4.7 The example of SU(2) and SO(3)
We illustrate the previous section with the example of . According to Table 4.6, the fundamental group of is . We can visualize this as follows: An element of is rotation by some angle about some (oriented) axis. We can represent this as a vector in of length in the direction of the axis. Elements of then correspond to points in the closed ball in of radius . However, rotation by about the axis is the same as rotation by about the axis , and so we must identify diametrically opposite points on the boundary of this ball.
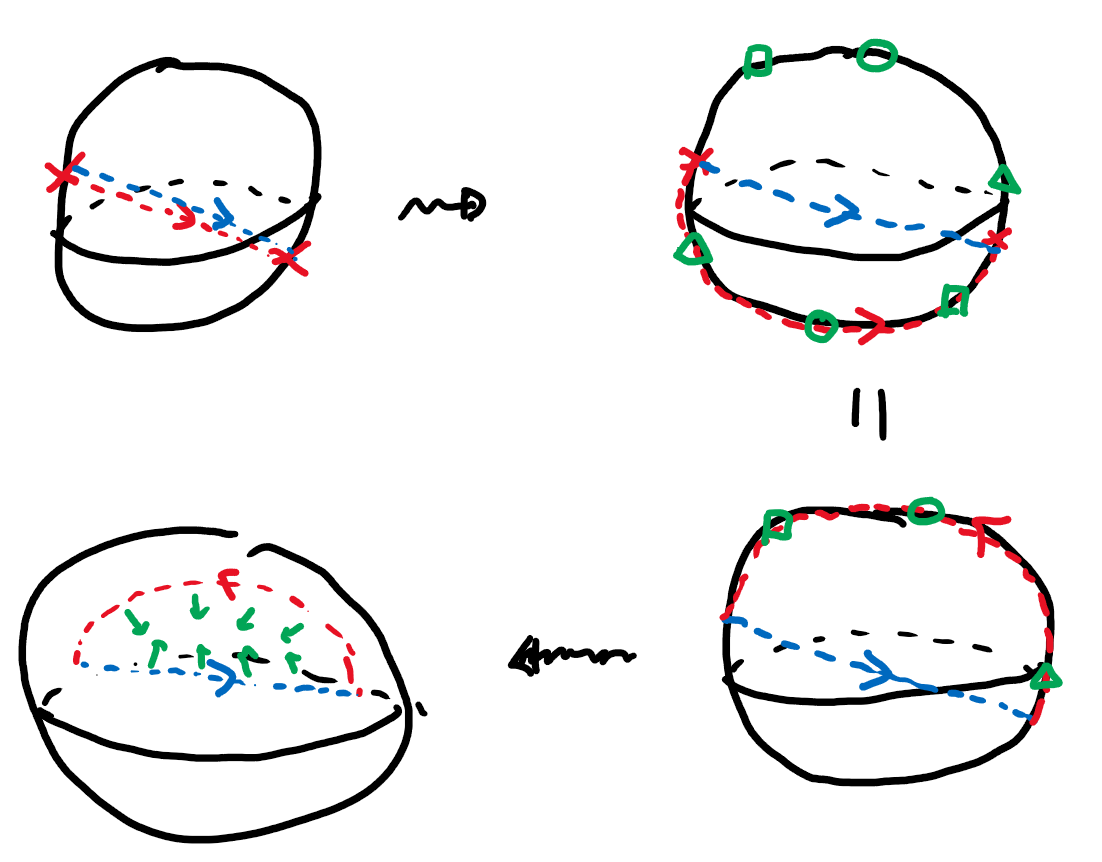
Now, the straight line in this three-dimensional sphere from a point on the boundary to its diametrically opposite point is a loop in since the endpoints represent the same rotation. You can convince yourself that this loop cannot be shrunk to a point (proving it rigorously requires some topology). However, if you go around the loop twice, then that can (!) be shrunk to a point. The idea is to move one copy of the loop out to the boundary, then use the ‘opposite point’ identification to move it to the other side, when you get a normal loop inside the ball which may be shrunk. See Figure 5.
A nice physical illustration of this is provided by the “Dirac belt trick”; here is a video of this demonstrated with long hair!
According to the general picture of the previous section, there should be a Lie group homomorphism whose kernel has order 2 and such that is simply connected, and it turns out that we can take . So we study this group for a bit.
Firstly, one can show (see problem 62) that every element of has the form
for with . It follows that is diffeomorphic to the unit sphere in , which is simply connected.
We would like to write down a homomorphism . For this, we want to find a three-dimensional real vector space , equipped with an inner product (i.e. a positive definite, symmetric, bilinear form) that is preserved by the action of . If we write down an orthonormal basis for , then the matrix of the action of each element of on , with respect to this basis, will be an element of giving the required homomorphism.
Where can we find ? From itself! We take , a three-dimensional vector space (by problem 56), and let act on via conjugation. We just need an inner product, and we may define one as follows: for , let
Exercise 4.57.
Show that this is a symmetric, positive definite bilinear form on .
Show that it is preserved by the action of , i.e. that
for all .
We therefore obtain a homomorphism once we fix an orthonormal basis; may be taken to be the matrices
Exercise 4.58.
Write down explicitly the image of under this homomorphism.
Finally, one can check that it has the right kernel:
Exercise 4.59.
Show that, if satisfies for all , then . Deduce that