1 Linear Lie groups and their Lie algebras
1.1 Linear Lie groups
We fix some notation:
-
•
denotes either the field or ;
-
•
is the vector space of all matrices over .
Definition 1.1.
A (linear) Lie group is a closed subgroup of , for some .
Remark 1.2.
The usual definition of a Lie group is a smooth manifold together with a group structure such that the group operations are smooth functions. It is a theorem (Cartan’s theorem, or the closed subgroup theorem) that every linear Lie group in the sense of definition 1.1 is a Lie group in this sense. Not every Lie group is a linear Lie group, but we will only be studying linear Lie groups; sometimes I might omit the word ‘linear’.
We give various examples (note that any subgroup defined by equalities of continuous functions will be closed):
-
•
the real general linear group : we simply impose the closed condition that all the entries of the matrix are real;
-
•
the (real or complex) special linear groups ;
-
•
we may see as a linear Lie group in two ways: either as or as .
-
•
if is a bilinear form on then we obtain a linear Lie group
There is a matrix such that for all ; the bilinear form is symmetric if and only if is symmetric, alternating if and only if is skew-symmetric (), and nondegenerate if and only if is nonzero. Then the group is:
Some special cases follow.
-
•
The orthogonal and special orthogonal groups
and ;
-
•
the unitary and special unitary groups
and (not strictly a special case of the above, but closely related);
-
•
the symplectic groups
where and is the matrix with 1s on the antidiagonal and 0s elsewhere. This corresponds to a nondegenerate alternating bilinear form. Remark: it is also common to use .
We may visualise as the unit circle in the complex plane; the group can also be visualised as this circle by identifying rotation by with .
The group can be visualised as a unit ball in with opposite points on its surface identified; this is identified in section 1.8 below.
Example 1.3.
Non-examples are (this is a subgroup of , but not closed), or (if is an irrational real number) the subgroup
This is a subgroup, isomorphic — as a group — to , but not closed. You should picture it as a string wound infinitely densely around a torus.
The idea of Lie theory is to simplify the study of these groups by just studying their structure ’very close to the identity’. This crucially uses that they are groups with a topology. By looking at the tangent spaces of these groups at the origin, you obtain Lie algebras; the group operation then turns into a structure called the Lie bracket.
1.2 The exponential map
Recall that denotes either or .
Definition 1.4.
Let . We define
This series is convergent for all . Let be the matrix norm
This satisfies the triangle inequality and also — this can be proved using Cauchy–Schwarz. Then for any with , we have
By the Weierstrass M-test, the power series for converges uniformly and absolutely on the closed ball , for any . In particular, is uniformly absolutely convergent on all compact subsets of , and hence is continuous.
Lemma 1.5.
We have (for all , ):
-
1.
.
-
2.
if . (This is NOT true in general).
-
3.
.
-
4.
is invertible, with inverse . In particular, .
-
5.
.
Proof.
The first point is obvious. Let’s prove (2) from which (3) and (4) follow. By definition,
| (using that and commute!) | ||||
| (putting ) |
which is equal to the right hand side. Rearranging the sums is valid by absolute convergence. Finally, (5) follows from . ∎
Example 1.6.
Let and . Then so
But , so . Hence ; see Problem 1.
In fact the exponential map is differentiable as a function of . For this, recall that a function is differentiable at a point if there is a (necessarily unique) linear map such that
and in this case is called the derivative of at . (This definition is independent of the choice of norms on and ).
Proposition 1.7.
The exponential map is differentiable at the origin (zero matrix), and its derivative at the origin is the identity map from to itself.
Proof.
In the above definition we have, , , , and we claim is the identity. Thus we need to show
which follows from the definition of the exponential map. Indeed,
which tends to zero as . ∎
Remark 1.8.
In fact, the exponential function has derivatives to all orders at all points. One way to see this is that the matrix entries of are given by multivariable power series in the , and multivariable power series are differentiable (indeed, smooth) on the interior of their region of convergence. Caution: termwise derivatives of matrix functions cannot be calculated naively by applying the formal derivative of the power series. For example, it does not make sense to say that the derivative of is , so is not "its own derivative" in any meaningful sense.
By the inverse function theorem, it follows from the remark that
Corollary 1.9.
The exponential map is a “local diffeomorphism” at : there exist neighbourhoods containing and containing such that is a smooth bijection onto with smooth inverse.
Remark 1.10.
In fact we can take . The inverse of in this neighbourhood is
which is convergent when .
Of course, is not injective in general. For example, for , and .
For the next result it will be useful to know the following facts from linear algebra.
Lemma 1.11.
Let . Then is conjugate to a matrix of the form where
-
•
is diagonal
-
•
is upper triangular with ‘1’s on the diagonal
-
•
and commute.
Proof.
(nonexaminable) This follows from Jordan normal form. Here’s a direct proof. Firstly write as a direct sum of generalised eigenspaces for : if is an eigenvalue of then we can write the characteristic polynomial where does not have as a root and is an integer. Then the image of on is the generalised eigenspace of . The kernel of is preserved by and does not have an eigenvalue equal to since is not a root of , which must be the characteristic polynomial of acting on . Thus
and by the rank-nullity theorem
is a decomposition of as a direct sum of the generalised eigenspace and a subspace preserved by . Repeating for each eigenvalue gives the required decomposition of . This reduces the proof of the statement to the case where has only one eigenvalue . In this case, we can inductively choose a basis of such that, for , the image of in is an eigenvector of with eigenvalue . With respect to this basis, is then upper triangular with ’s on the diagonal, and we get the required decomposition with . ∎
Lemma 1.12.
We have
Proof.
Conjugate so that is an upper triangular matrix with diagonal entries , and then note that is also upper triangular with diagonal entries .
Thus
∎
Lemma 1.13.
The exponential function is surjective.
Proof.
Sketch. Details are in Problem 4. First prove it for and as in Lemma 1.11. The case of diagonal matrices is easy, and for note that is nilpotent so the power series for is a finite sum.
For general , by conjugating we can reduce to the case where as above. If and , then
because and commute (one must choose and carefully since is not injective). ∎
Remark 1.14.
The lemma is not true over ; by Lemma 1.12, the determinant of is positive for all real matrices .
The next proposition will be useful when we discuss Lie algebras of linear Lie groups.
Proposition 1.15.
(Lie product formula) We have
Proof.
Let
noting that for sufficiently small, lies in the neighbourhood of where is defined. Since and are differentiable and the product of differentiable functions is differentiable, we apply the chain rule to see that . Therefore
(Here, the notation , for any function , denotes some function such that as tends to some limit, usually 0 or . In this case, as .)
Setting and multiplying by we get
Therefore
Taking the limit as gives the result. ∎
1.3 One-parameter subgroups
Lemma 1.16.
The map from to given by
is a differentiable group homomorphism.
We have
In particular,
Proof.
The given map is a group homomorphism by Lemma 1.5 part 4.
By definition,
As this power series (and its termwise derivative) are uniformly convergent on any compact subset, we can compute its derivative by differentiating termwise, which gives
Definition 1.17.
A one-parameter subgroup of is a differentiable group homomorphism . That is, a differentiable map such that
for all .
The infinitesimal generator of a one-parameter subgroup is the element .
By the previous lemma, for every the map is a one-parameter subgroup, with infinitesimal generator .
Example 1.18.
Let be rotation about the -axis:
Then is a one-parameter subgroup, and its infinitesimal generator is
In fact . Problem 5 asks you to generalize this to rotation about an arbitrary axis.
Remark 1.19.
(non-examinable) For a one-parameter subgroup , it actually suffices to require that is continuous. Differentiability then comes for free.
Indeed, if is continuous, the integral exists. Moreover,
The RHS is differentiable with respect to by the fundamental theorem of calculus. Therefore, to prove that is differentiable, we only need to show that there is an such that is an invertible matrix. Now consider the function
It is well-defined for and . Hence, for , is invertible, and therefore so is .
The following is a very important property of one-parameter subgroups: that they all come from the exponential map.
Proposition 1.20.
Let be a one-parameter subgroup with infinitesimal generator .
Then
for all . That is, all one-parameter subgroups arise from the exponential function.
Proof.
From the definition of one-parameter subgroups, we have
Now consider the differential equation
We know that both and are both solutions with the same initial condition that . Therefore they must be equal. ∎
1.4 Lie algebras
Definition 1.21.
Let be a linear Lie group. We define its Lie algebra by
In other words, it is the set of such that the one-parameter subgroup infinitesimally generated by is contained in the group . We write for this Lie algebra.
Remark 1.22.
It is not true that . This is not even true for , why?
The Lie algebra can also be defined more geometrically as the tangent space to at the identity; the above definition then becomes the “exponential characterization” of the Lie algebra. The equivalence is given by the following theorem:
Theorem 1.23.
With and as above, we have
In other words, is the set of all possible tangent vectors to curves in passing through .
Proof.
We show that lies in the right hand side (i.e. is a tangent vector) if and only if for all .
If for all then we may take the derivative of and conclude that is a tangent vector at .
Now assume that is a tangent vector at . Then there is a differentiable map , for some , such that and . By the local inverse property of , there is a neighbourhood of on which is defined and differentiable. For small, set
Then , and by the chain rule (using that the derivative of at is the identity map) we have . Hence
as .
Fix any . For large, and lies in the domain of , so
Since is closed and
with for all , we conclude that . ∎
We define the dimension of the Lie group to be the dimension of the associated Lie algebra . We now compute the Lie algebras of many of the groups that we are interested in:
Proposition 1.24.
The Lie algebras of , , , , , and are given by
Here is the space of skew-symmetric real matrices and is the space of skew-Hermitian matrices.
Proof.
The first one is obvious for and left as an exercise for . For the second one, first suppose that . Then so . Conversely, if then for all ; differentiating at gives as required.
For the third one, we need to find all such that
| (1.1) |
for all . Taking the derivative for both sides with respect to , we obtain
Evaluating at , we get
Thus .
Conversely, if , then equation (1.1) holds because
Thus and we have equality by the opposite containment above.
For the dimension, notice that satisfying is determined by its upper triangular part and that the diagonal entries must be all zeros; as there are entries strictly above the diagonal, that is the dimension of .
Finally, it is clear that . If then and so . Thus for all and so , giving the claimed equality.
The unitary and symplectic Lie algebras can be computed in a similar way — homework! ∎
Proposition 1.25.
Let be the Lie algebra of a (linear) Lie group . Then
-
1.
is a real vector space (inside ).
-
2.
If and if , then .
-
3.
For ,
Proof.
For the first part we must show closure under scalar multiplication and addition. For scalar multplication, we reparametrise: suppose and . Then lies in (as is still a real number) and so .
For addition, let . Then for all , so the product
is a differentiable path in with and . Hence by Theorem 1.23.
Part (2) follows from and the definition of .
For part (3), we know by part (2) that, for ,
Then
But also by definition
This is a limit of elements of the vector space , which is a closed subset of , and so must itself be an element of . ∎
Definition 1.26.
A Lie algebra is an -vector space together with a bilinear map (Lie bracket)
that satisfies the following properties.
-
1.
It is alternating: for all .
-
2.
The Jacobi identity holds:
for all .
Definition 1.27.
If is a Lie algebra, then a Lie subalgebra is a subspace that is closed under the Lie bracket.
Proposition 1.28.
The Lie bracket
makes into a Lie algebra.
If is a Lie group, then is a (real) Lie subalgebra of .
Proof.
For the first part, simply check the axioms directly (the Jacobi identity is a bit of a pain…).
We have already shown the second part (we only have to show that is closed under the bracket). ∎
Before computing the Lie algebras of various matrix groups, we give an example that doesn’t seem to be of this form.
Example 1.29.
Let and let . Then this is a Lie algebra (just check the axioms).
In fact, . To see this, send the vector to the infinitesimal generator of the one parameter subgroup of given by ‘rotating around the axis at speed ’.
Definition 1.30.
A Lie algebra is called abelian if for all .
Definition 1.31.
The center of a Lie algebra is
It is an abelian Lie subalgebra of .
1.5 Lie group and Lie algebra homomorphisms
Definition 1.32.
A Lie group homomorphism between two linear Lie groups and is a continuous group homomorphism.
An isomorphism is a bijective Lie group homomorphism whose inverse is also continuous.
Remark 1.33.
In fact, a continuous homorphism between linear Lie groups is automatically a smooth map of smooth manifolds, and if it is bijective then the inverse is automatically continuous.
Definition 1.34.
A homomorphism of Lie algebras is an -linear map such that
for all .
An isomorphism is an invertible homomorphism.
Definition 1.35.
Let be a Lie group homomorphism. Define the derivative (or derived homomorphism)
by
for . 11 1 We can justify taking the derivative by appealing to Remark 1.19.
Remark 1.36.
In fact, is the derivative of at the identity in the sense of smooth manifolds; recall that and are the tangent spaces to and at the identity.
Theorem 1.37.
Let be a Lie group homomorphism with derivative . Then
-
1.
The following diagram commutes:
That is, for we have
-
2.
For all ,
-
3.
The map is a Lie algebra homomorphism.
Proof.
-
1.
Consider the one parameter subgroup defined by . By construction, . By Proposition 1.20, one parameter subgroups are determined by their derivative at 0, so that we must have
-
2.
We have
as claimed.
-
3.
To show that is a Lie algebra homomorphism, we need to show that
-
•
is -linear; and
-
•
.
So let and . By definition,
If we now set , we can rewrite this as: So commutes with scalar multiplication. For additivity, we have
On the other hand, by Proposition 1.15 and using part (1)
Taking the derivative at , we conclude that
showing additivity.
Finally we show that respects the Lie bracket. Let . By parts (1) and (2) we have
Take the derivative for both sides at : the derivative of the RHS is , and the derivative of the LHS is (as is linear).∎
-
•
1.6 Complex Lie groups and holomorphic homomorphisms
Definition 1.38.
A complex linear Lie group is a closed subgroup of whose Lie algebra is a complex subspace of (as opposed to just a real subspace).
Note that and are only real Lie algebras and correspondingly and are only real Lie groups, even though they consist of complex matrices. On the other hand, and are complex Lie algebras, so and are complex Lie groups.
A complex Lie algebra is a -vector space with a -bilinear Lie bracket satisfying the same axioms as for a Lie algebra. Thus the Lie algebra of a complex Lie group may be viewed as a complex Lie algebra (since the Lie bracket on is clearly -bilinear).
Definition 1.39.
Suppose that and are complex Lie groups and is a homomorphism. Then is holomorphic if is -linear.
(This implies that is a holomorphic map of complex manifolds.)
Example 1.40.
The map is holomorphic. The map sending to is not holomorphic.
1.7 Topological properties
We have shown that the differential gives a map
This raises two natural questions:
-
1.
Is the map injective? Does the derivative uniquely determine the Lie group homomorphism ?
-
2.
Is the map surjective? Or in other words, does every Lie algebra homomorphism ’exponentiate’ (or ’lift’) to a Lie group homomorphism such that ? We say ’exponentiate’ since if yes, then would need to satisfy . So this gives a formula for , at least on the image of . The question is whether this is well-defined (the exponential map is neither injective nor surjective in general) and whether this defines a homomorphism.
The answer to these questions is actually of topological nature, which we discuss in this subsection.
While we only defined linear Lie groups to be closed subgroups of , in fact they have much nicer topological properties than arbitrary closed subsets (which can be pretty wild, like the Cantor set).
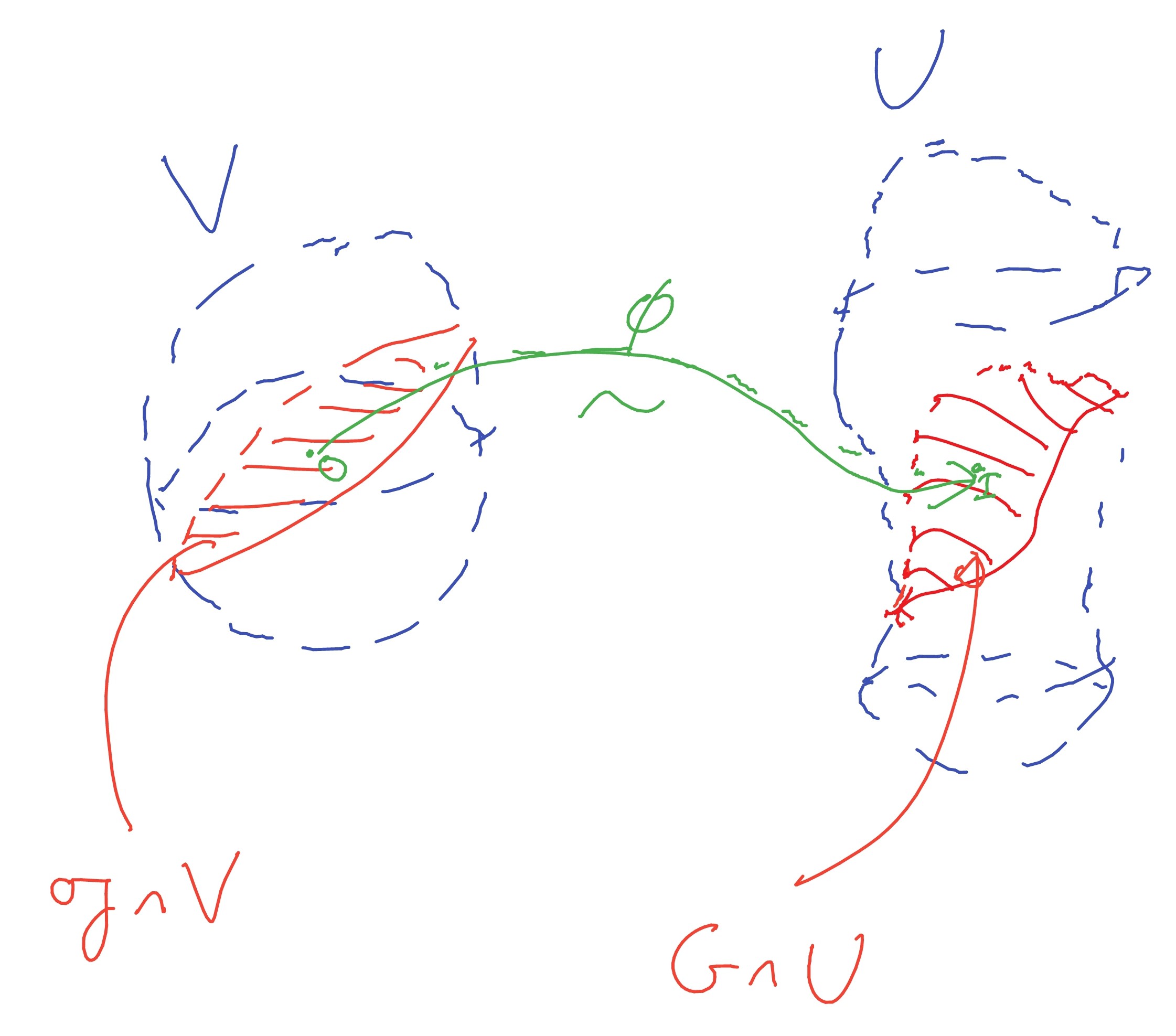
Theorem 1.41.
(closed subgroup theorem) Let be a closed subgroup, and let be its Lie algebra. Then for every there is an open subset and an open subset such that is a homeomorphism . See Figure 1.
Remark 1.42.
An open subset is a subset such that for some open subset (which has the usual definition in terms of open balls). Likewise, an open subset of means open in its usual Euclidean topology as a finite-dimensional complex vector space.
A homeomorphism is a continuous bijection with continuous inverse.
Proof.
(Sketch, nonexaminable.) Since, for any , the map ‘multiply by ’ is continuous with continuous inverse, it suffices to prove this when is the identity element. Choose a sufficiently small open neighbourhood of such that is a homeomorphism onto an open neighbourhood of (for this, you can use the open mapping theorem). Set and . The tricky point is to show that, if is sufficiently close to the identity (so that is defined), then ; this ensures that restricts to a homeomorphism . ∎
If you don’t want to take this theorem on faith, then feel free to include its conclusion as part of the definition of a linear Lie group (in all our examples, it would be straightforward to verify).
We say that is connected if, for every , there is a continuous function (or path) with and . For those of you taking courses in topology, this is actually the definition of path-connected; however, it follows from the closed subgroup theorem that Lie groups are locally path-connected, and being path-connected is equivalent to being connected for such spaces.
Let be a linear Lie group and let be the set of all such that there is a continuous path with and .
Proposition 1.43.
The subset is a normal subgroup of .
Proof.
Let , and let be paths with and .
Then define a path from to by following and then . Concretely, define by
and observe that this is a continuous path from to . This shows is closed under multiplication.
The identity and inverse axioms, and the normality, are left as exercises. ∎
Proposition 1.44.
The subgroup is an open and closed subset of .
Proof.
Firstly, if is an open subgroup then
is a union of open subsets, so is also closed.
To show is open, it suffices to show that it contains an open subset containing the identity, as then is an open subset containing , for all . If is a sufficiently small open ball around then by Theorem 1.41 is an open subset around , and is path-connected since is. Thus as required. ∎
It follows from this result that the quotient topology on is discrete. 22 2 If you don’t know the definition of the quotient topology, please ignore this.
It is clear that is connected if and only if .
Exercise 1.45.
Prove that is connected for . Hint: show that it is path-connected, by induction.
Proposition 1.46.
The group is connected.
Proof.
Omitted, but here is a sketch.
-
1.
Use Gram–Schmidt orthogonalisation to show that where is the group of upper triangular matrices with positive diagonal entries.
-
2.
Show that is connected (see previous exercise) and is connected.
-
3.
Deduce that is connected.
∎
Remark 1.47.
There is an alternative proof: show that is generated by elementary matrices, and then connect every elementary matrix to the identity.
Among the Lie groups related to this course, , , , , , , and are connected, while and are not connected, with their connected components being and respectively.
Proposition 1.48.
If , then .
Proof.
Note that for any , the image defines a curve in containing the identity . This curve is in the connected component of the identity. So for all . ∎
Theorem 1.49.
Let be a Lie group and be its Lie algebra. Then the subgroup generated by is .
In particular, if is connected, then each element of is a (non-unique) product of a finite number of exponentials.
Proof.
Since contains an open neighbourhood of the identity (by Theorem 1.41), it follows that generates an open subgroup of , which is then necessarily closed. But since is connected it has no proper nonempty open and closed subsets,33 3 This argument uses the basic fact that a path-connected topological space is connected. and so . ∎
As a corollary we immediately obtain the answer to the first question above.
Proposition 1.50.
Let be a connected (linear) Lie group and let be a Lie group homomorphism. Then the differential uniquely determines .
Proof.
Since , the values determine on the subgroup generated by the , which is exactly . ∎
Exercise 1.51.
Show that, if is a connected (linear) Lie group with Lie algebra , then is abelian if and only if is (see Definition 1.30).
What goes wrong when is not connected?
Example 1.52.
Any finite group can be embedded in for some , and so regarded as a linear Lie group. Its Lie algebra is the zero vector space, so the derivative of a homomorphism is always zero. In other words, the Lie algebra knows nothing in this case.
Example 1.53.
Recall that on the orthogonal group , the determinant (which is a continuous map!) takes the values . Hence is not connected; is the connected component of the identity. (This is related to ; that is, the condition automatically implies that has trace zero and hence that has determinant .)
Correspondingly, the determinant on has zero differential, as it is constant on an open neighbourhood of the identity. This means that the differential on cannot distinguish the determinant from the trivial map ().
We now turn to the second question, whether every Lie algebra homomorphism exponentiates to a Lie group homomorphism. In the light of what we have seen, it is sensible to restrict to the case of connected Lie groups. However, even with this restriction, the answer is in general no, as the next example shows!
Example 1.54.
The linear Lie groups and both have Lie algebra with trivial Lie bracket; in the second case we get the subspace of and identify it with by dividing by .
The Lie algebra homomorphisms are all of the form for some . We consider which of these exponentiate to homomorphisms of Lie groups.
-
1.
The map always exponentiates to a map , specifically the map
-
2.
The map always exponentiates to a map , specifically the map
-
3.
The map never exponentiates to a map if . If it did, the map would have to send
and setting gives .
-
4.
The map exponentiates to a map if and only if , in which case the map is
Indeed, the map would have to be
and setting shows that , when the map is as claimed.
Exercise 1.55.
Check that the Lie algebra of is also isomorphic to . Write down an isomorphism ; what is the identification of Lie algebras it induces?
The key difference between and is that the former is simply connected while the latter is not (it has fundamental group ). We explain this a bit further.
Recall we call a topological/metric space simply connected if it is path-connected and if every loop can be continuous shrunk to a single point; rigorously, if every continuous map from the unit circle to can be extended to a continuous map from the unit disc to . In topology, the failure of a space to be simply connected is measured by the ’fundamental group’ : is simply-connected if and only if is trivial.
Theorem 1.56.
Let be a simply connected (linear) Lie group. Let be any other (linear) Lie group. Let and be their Lie algebras. Then every homomorphism exponentiates to a unique homomorphism .
Hence we have a 1-1 correspondence
Proof.
This is beyond the scope of this course. Note in the above example is simply connected while the circle group is not. ∎
One can show that and are simply connected. Here is a small table showing our connected groups and their fundamental groups.
| , | |
| , | |
Remark 1.57.
It is not an accident that the fundamental groups of and are isomorphic — Gram–Schmidt orthogonalization, as used in the proof of Proposition 1.46, shows that and are homotopy equivalent. A similar remark applies to and .
If is not connected, or its identity component is not simply connected, we can work in the following way.
-
•
There exists a ’universal cover’ of which is simply connected, and also has the structure of a Lie group (not necessarily linear, unfortunately). There is a surjective group homomorphism with discrete kernel , so that .
-
•
The kernel of is isomorphic to the fundamental group .
-
•
Homomorphisms out of are in 1-1 correspondence with homomorphisms out of which are trivial on .
-
•
The Lie algebras of , and coincide (more precisely, the maps and induce isomorphisms of Lie algebras).
-
•
In general can be an arbitrary finite group! For this reason, it is common to restrict attention to connected Lie groups.
The diagram looks as follows:
Example 1.58.
The group is not simply connected. Here the universal cover is (this is a linear Lie group because it is isomorphic to the upper triangular matrices with 1s on the diagonal — a similar argument shows that any vector space (with addition) is a Lie group). The map is then
and we see that the kernel of is , which is indeed the fundamental group .
1.8 The example of SU(2) and SO(3)
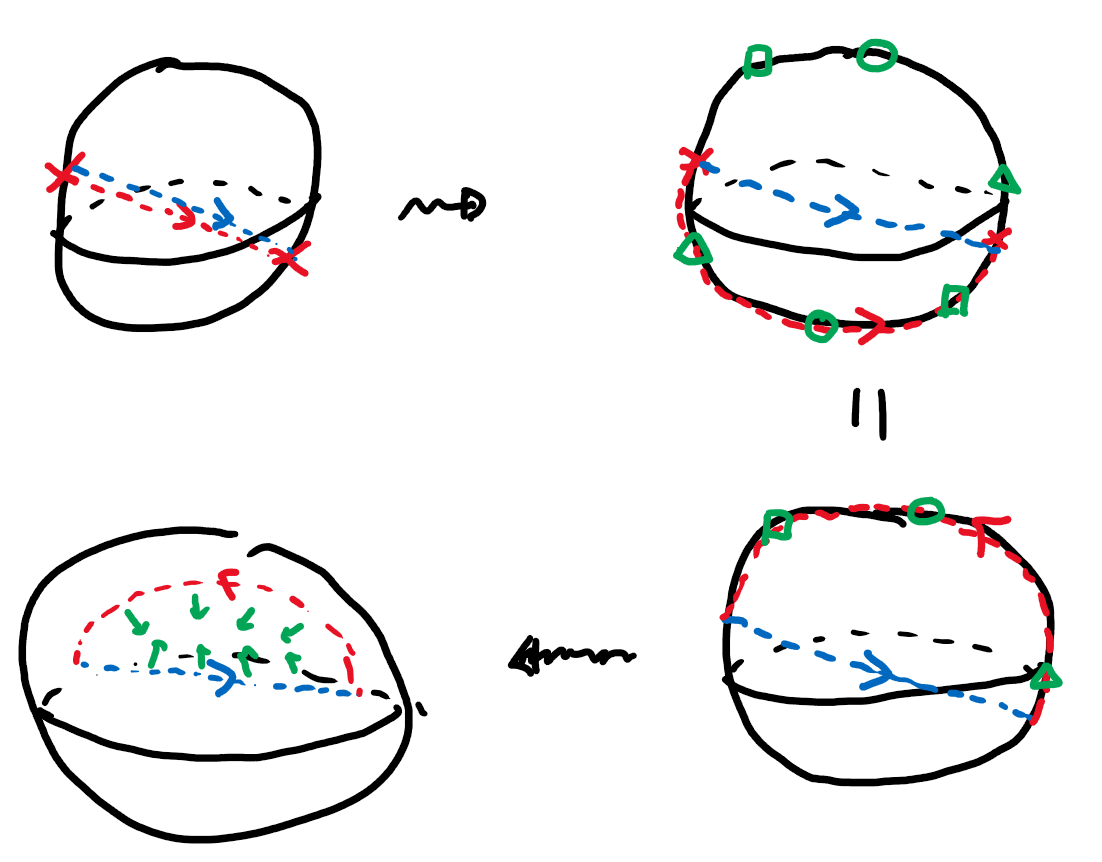
We illustrate the previous section with the example of . According to Table 1.7, the fundamental group of is . We can visualize this as follows: An element of is rotation by some angle about some (oriented) axis. We can represent this as a vector in of length in the direction of the axis. Elements of then correspond to points in the closed ball in of radius . However, rotation by about the axis is the same as rotation by about the axis , and so we must identify diametrically opposite points on the boundary of this ball.
Now, the straight line in this three-dimensional sphere from a point on the boundary to its diametrically opposite point is a loop in since the endpoints represent the same rotation. You can convince yourself that this loop cannot be shrunk to a point (proving it rigorously requires some topology). However, if you go around the loop twice, then that can (!) be shrunk to a point. The idea is to move one copy of the loop out to the boundary, then use the ‘opposite point’ identification to move it to the other side, when you get a normal loop inside the ball which may be shrunk. See Figure 3.
A nice physical illustration of this is provided by the “Dirac belt trick”; here is a video of this demonstrated with long hair!
According to the general picture of the previous section, there should be a Lie group homomorphism whose kernel has order 2 and such that is simply connected, and it turns out that we can take . So we study this group for a bit.
Firstly, one can show (see problem 12) that every element of has the form
for with . It follows that is homeomorphic to the unit sphere in , which is simply connected (that is, there is a continuous bijection with continuous inverse).
In Problem 8 we constructed an isomorphism of Lie algebras . Since is simply connected, Theorem 1.56 implies that this exponentiates to a Lie group homomorphism
We will construct explicitly later, using the adjoint representation (see Section 2.4).
For now, we record the key facts: is surjective and
In particular , so realises as the universal cover of , and the kernel is (canonically) isomorphic to .