4 SL3
We now discuss the finite-dimensional complex-linear representation theory of . This then tells us everything about the holomorphic representations of and, via the machinery of real forms, tells us about representations of and .
Much of what we say, particularly at first, will generalise in a fairly obvious way to .
In this section, all representations of will be assumed to be complex-linear.
4.1 The Lie algebra sl3,C
We study the Lie algebra
of traceless matrices. It has dimension . We first need to find the analog of the standard basis of
First, notation: we write for the matrix with a ’1’ in row and column , and ’0’ elsewhere. Then if and only if .
The analogue of will be the entire subalgebra of diagonal matrices.
Definition 4.1.
The (standard) Cartan subalgebra of is , given by
Note that is an abelian subalgebra, because diagonal matrices commute with each other.
We pick as a basis of the elements
| and | ||||
and also define .
Next we consider the adjoint action of on , seeking eigenvectors and eigenvalues. The key calculation is:
Exercise 4.2.
Check this!
Thus is a basis of simultaneous eigenvectors in for the adjoint action of .
4.2 Weights
Suppose that is a finite-dimensional complex-linear representation of . Suppose that is a simultaneous eigenvector for all , . Then, for each , there is an such that . Since is complex-linear, is a complex-linear map . In other words, is an element of the dual space . This motivates the following definition:
Definition 4.3.
Suppose that is a representation of . Then a weight vector in is a nonzero vector such that there is (the weight) with:
for all .
The weight space of is
On we have some ‘obvious’ functionals given by
These span , subject to the relation44 4 More precisely, is isomorphic to the quotient of the three dimensional vector space with basis by the subspace spanned by .
We compute the weights of some particular representations.
Example 4.4.
If is the standard representation of (for which for all ), then the standard basis vectors are all weight vectors:
from which we see that for all . See table 1.
| Weight | |||
| Weight vector |
Example 4.5.
If is the dual of the standard representation then it has a basis defined by
One can show that is a weight vector of weight , so the weights are . See problem 37.
Example 4.6.
Let be the symmetric square of the standard representation. The rules for calculating the weights of are the same as for — so, for the symmetric square, we add all unordered pairs of weights of . For details see section 4.5 The weights of are and so the weights of are
Note that, if we wanted, we could also write etc.
Example 4.7.
Let with the adjoint representation defined by . As already observed, we have
for and , while for . Thus the weights of the adjoint representation are () and . The weight space for is , which has dimension two with basis and ; we say that the weight has multiplicity two in . We obtain table 2.
Definition 4.8.
A root of is a nonzero weight of the adjoint representation. A root vector is a weight vector of a root, and a root space is the weight space of a root.
In other words, a root with root vector is a nonzero element such that
We write
for the set of roots of . Out of these, we call the positive roots and the negative roots. We write ; these are the simple roots. Note that is the sum of the two simple roots. We will sometimes write for the root .
Finally, we have the root space or Cartan decomposition
where the are the root spaces, which are all one-dimensional.
Exercise 4.9.
Work through all the above theory in the case of . What are the roots and root spaces? What is the relation between the weights (as linear functionals on ) and between the weights defined in section 3?
4.3 Visualising weights
Shortly we will prove that, if is a finite dimensional representation of , then its weights are integer linear combinations of the . In other words, they lie in the weight lattice
Exercise 4.10.
Show that if and only if . Must the be integers?
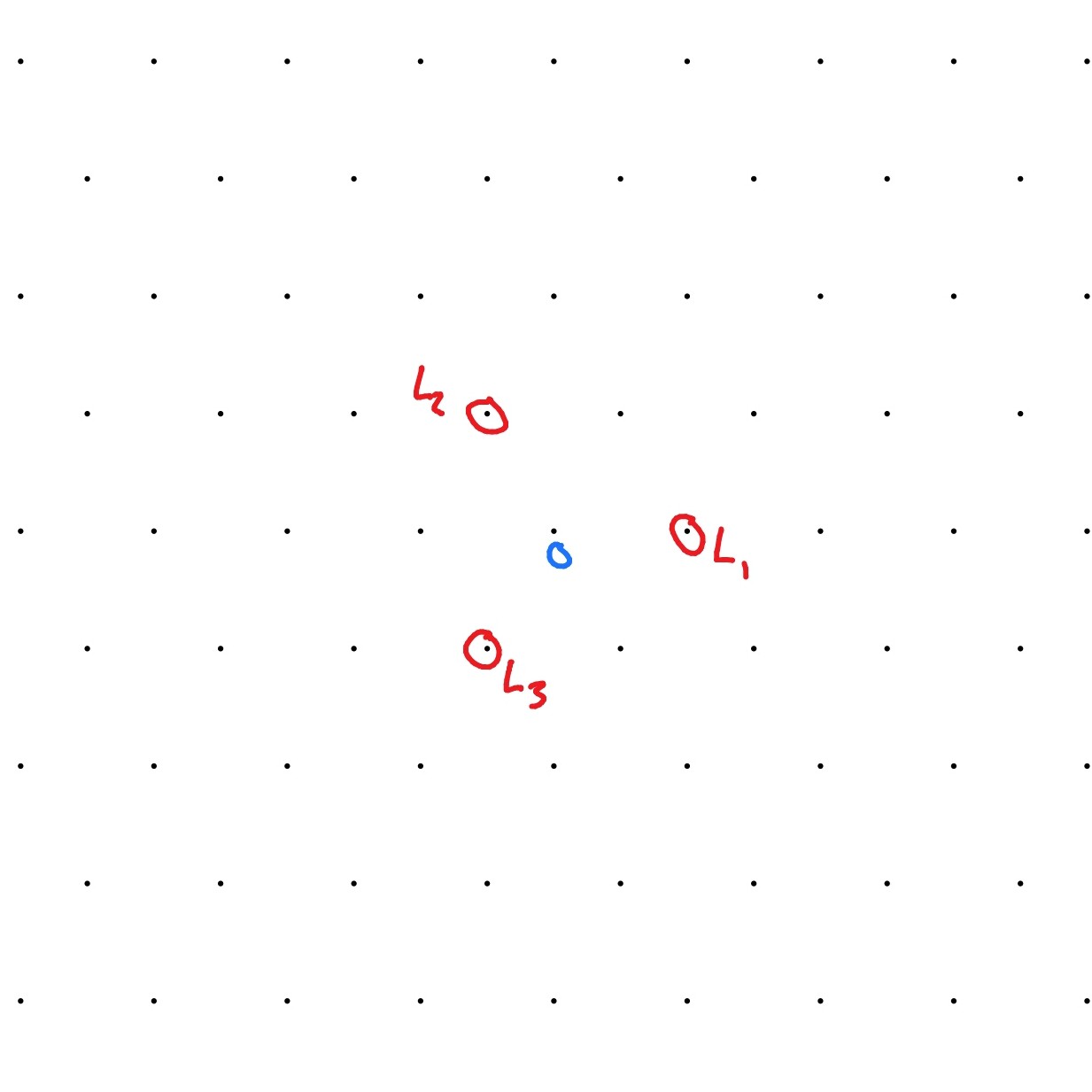
We want to visualise this in a way that treats symmetrically. Noticing that they sum to zero, we regard them them as the position vectors of the vertices an equilateral triangle with unit side length, centred on the origin. The weight lattice is then the set of vertices of equilateral triangles tiling the plane. For any representation , its weight diagram is then obtained by circling the weights that occur in that representation.
Example 4.11.
We draw the weight diagram for the standard representation, in Figure 5.
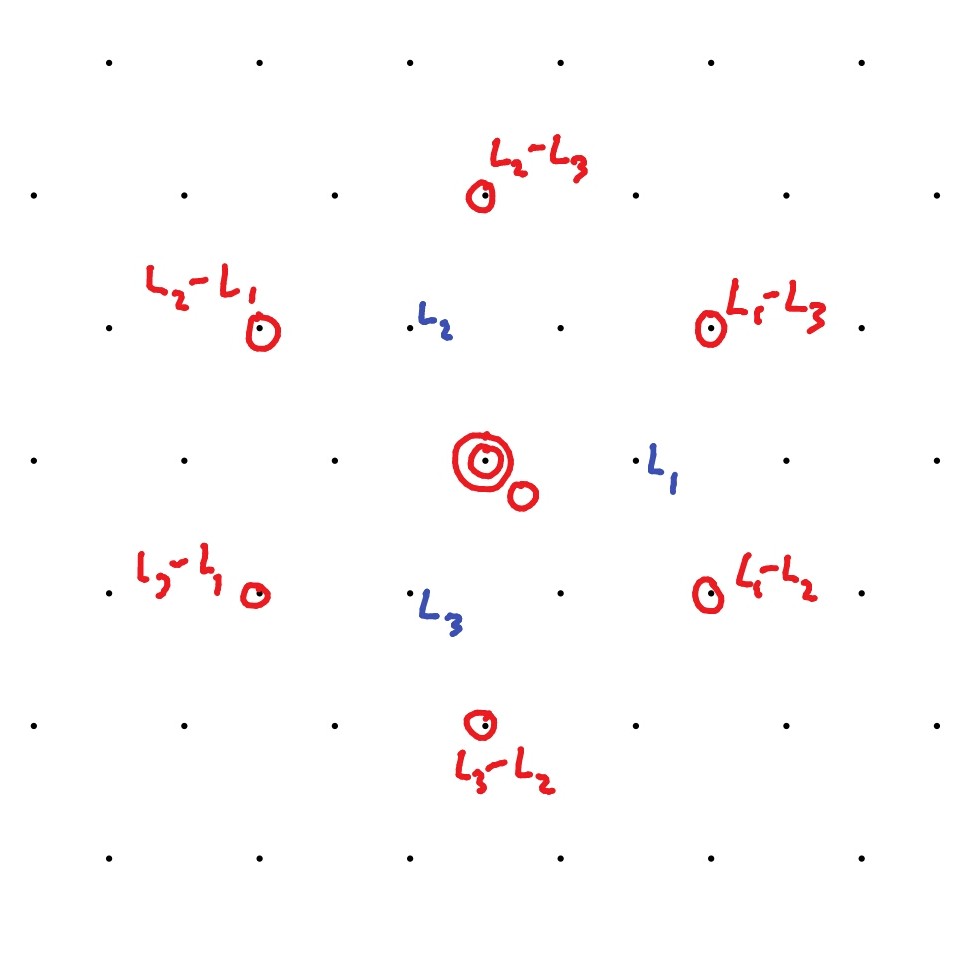
Example 4.12.
We draw the weight diagram for the adjoint representation in Figure 6. Note that in this case the dimension of the weight space for the weight is two. We say the weight has multiplicity two, and indicate this on the weight diagram by circling the weight twice. If the multiplicity was much higher, we would need another method (like writing the multiplicity next to the circle as a number).
4.4 Representations and weights
Firstly, we recall from above that any finite-dimensional representation of is completely reducible (Theorem 3.27).
Theorem 4.13.
Let be a finite-dimensional representation of . Then:
-
•
There is a basis of consisting of weight vectors.
-
•
Every weight of is in the weight lattice .
We may combine these two into the single equality
Proof.
Consider the embedding embedding a matrix into the ‘top left’ of a matrix:
This is a Lie algebra homomorphism, and is a representation of . We know from the theory that
is diagonalizable with integer eigenvalues. If is a weight vector with weight , then it is an eigenvector for with eigenvalue . Thus is an integer.
Now, there is another embedding putting a matrix in the ‘bottom right’ corner. The same argument then shows that is diagonalisable with integer eigenvalues, which shows that is an integer for every weight.
Thus every weight is in the weight lattice. Moreover, and are diagonalizable, and they commute with each other since and commute and is a Lie algebra homomorphism. A theorem from linear algebra states that commuting, diagonalizable matrices are simultaneously diagonalizable. It follows that there is a basis of consisting of simultaneous eigenvectors for and . Since and span , this is a basis of weight vectors. ∎
Remark 4.14.
There is a third homomorphism
We have .
Note that, for , and , so and will play the role of raising and lowering operators.
Remark 4.15.
We could also prove Theorem 4.13 by exponentiating to a representation of and considering the action of the subgroup of diagonal matrices with entries in , which is compact (isomorphic to ). Compare the proof of the statement that the weights of representations of are integers.
4.5 Tensor constructions
We record how the various linear algebra constructions we know about interact with the theory of weights. If is a representation of then we consider its weights as a multiset
where and each is written in this list — the multiplicity of — times.
Suppose that is another representation of with multiset of weights
Theorem 4.16.
Suppose that are as above. Then:
-
1.
The weights of are .
-
2.
The weights of are
-
3.
The weights of are
-
4.
The weights of are
Proof.
Let be a basis of weight vectors of such that has weight , and let be similar for with weights .
-
1.
The dual basis is a basis of weight vectors in with having weight .
-
2.
If has weight and has weight , then for all ,
So is a basis of with the given weights.
-
3.
Similarly to the previous part,
is a basis of with the given weights.
-
4.
Similar.
∎
Remark 4.17.
Similar considerations apply to representations of (or ).
4.6 Highest weights
We now develop the theory of highest weights, analogous to that for . We first carry out the fundamental weight calculation (the analogue of Lemma 3.7).
Lemma 4.18.
(Fundamental Weight Calculation). Let be a representation of and let be a weight vector with weight . Let be a root and let be a root vector. Then
Thus we obtain a map
Proof.
Let . Then
Example 4.19.
We work this out for the adjoint representation. Recall that, for , we have the root with root vector . The above calculation shows that, if and are roots, then . Here are some examples:
-
•
If , , then is not a root so . Thus (which could also be checked directly).
-
•
If then we get
-
•
If , , then and we get
In fact, you can check that .
Exercise 4.20.
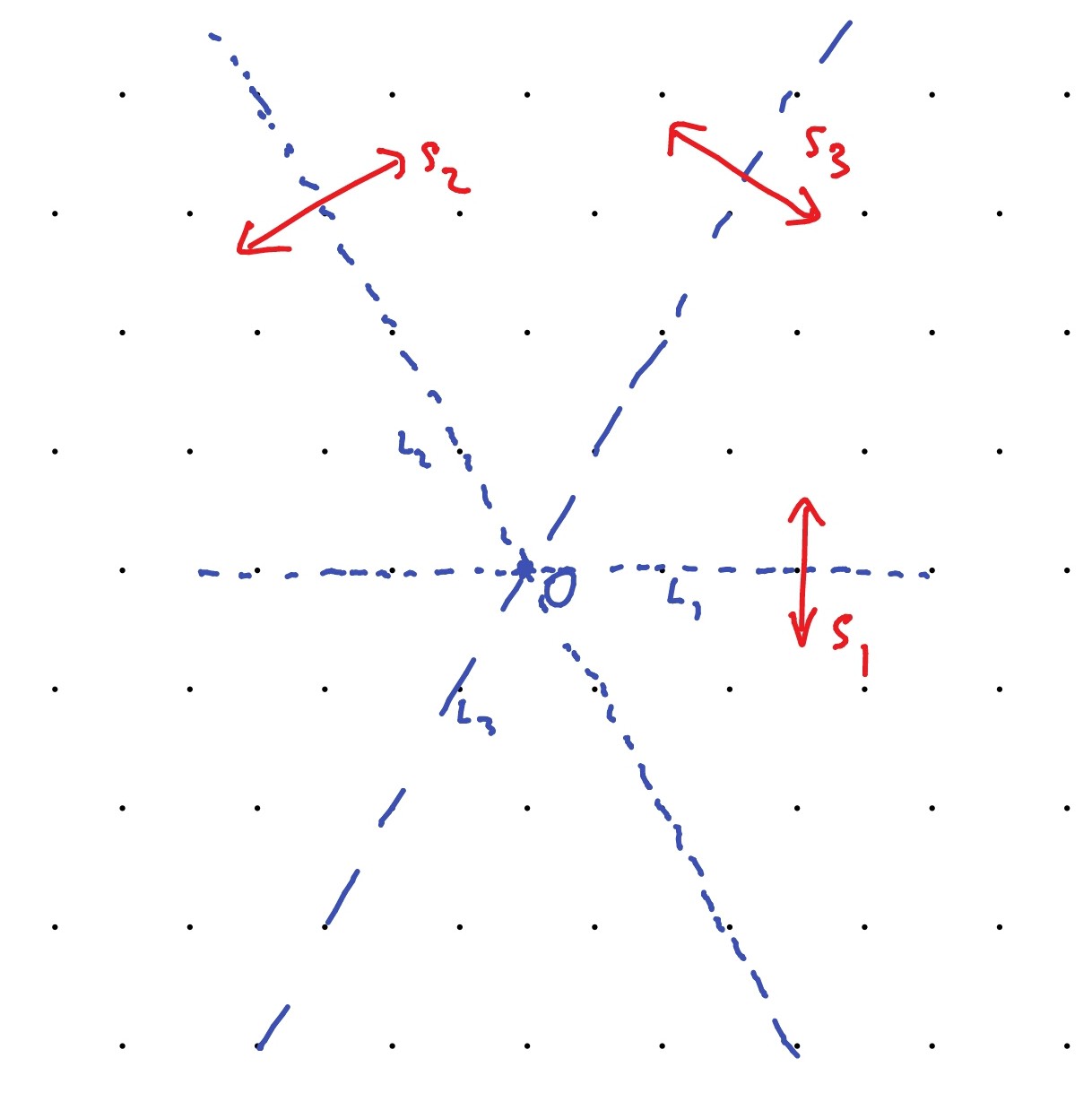
Let be a finite-dimensional irreducible representation of . Then the weights occurring in all differ by integral linear combinations of the roots of , that is, by integral linear combinations of .
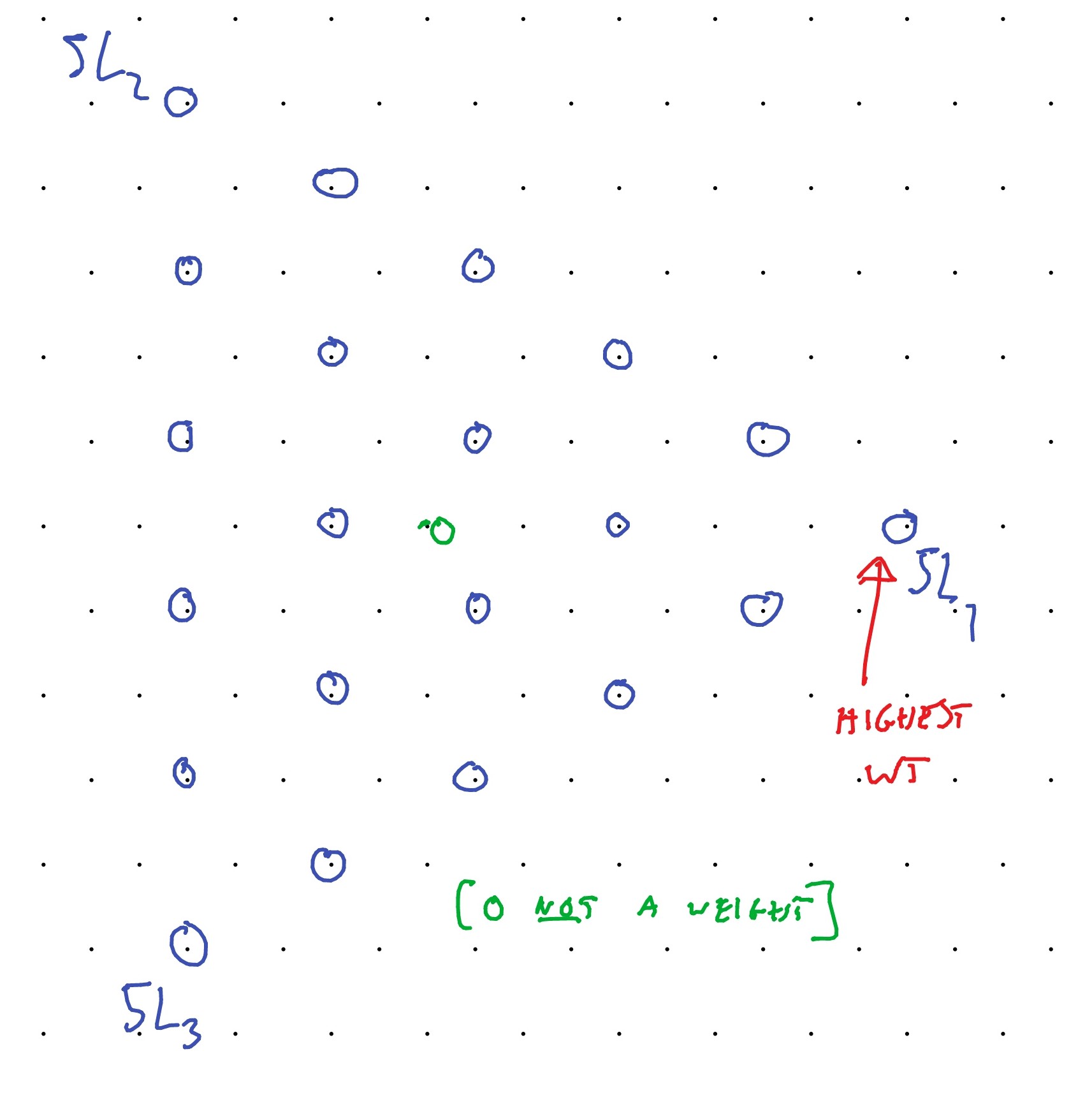
With regard to the weight diagram, we observe that the ’positive’ root vectors , , move in the ’northeast’ direction while the ’negative’ root vectors move in the ’southwest’ direction (roughly speaking). See Figure 7.

Definition 4.21.
Let be a representation of . A highest weight vector in is a vector such that:
-
1.
is a weight vector; and
-
2.
.
The weight of is then a highest weight for .
Remark 4.22.
Since , it follows that a highest weight vector is also killed by . So it is killed by all the positive root vectors.
Example 4.23.
-
1.
The standard representation has highest weight with highest weight vector .
-
2.
The dual has highest weight with highest weight vector .
-
3.
The adjoint representation has highest weight with highest weight vector .
-
4.
The symmetric square has highest weight with highest weight vector .
Lemma 4.24.
Let be a finite-dimensional representation of . Then has a highest weight vector.
Proof.
For a weight , define . Of all the finitely many weights of , choose a weight such that is maximal.
Let be a weight vector with this weight. Then , if nonzero, has weight
and
This is not a weight of by maximality of . Thus . Similarly , if nonzero, has weight
and , so . ∎
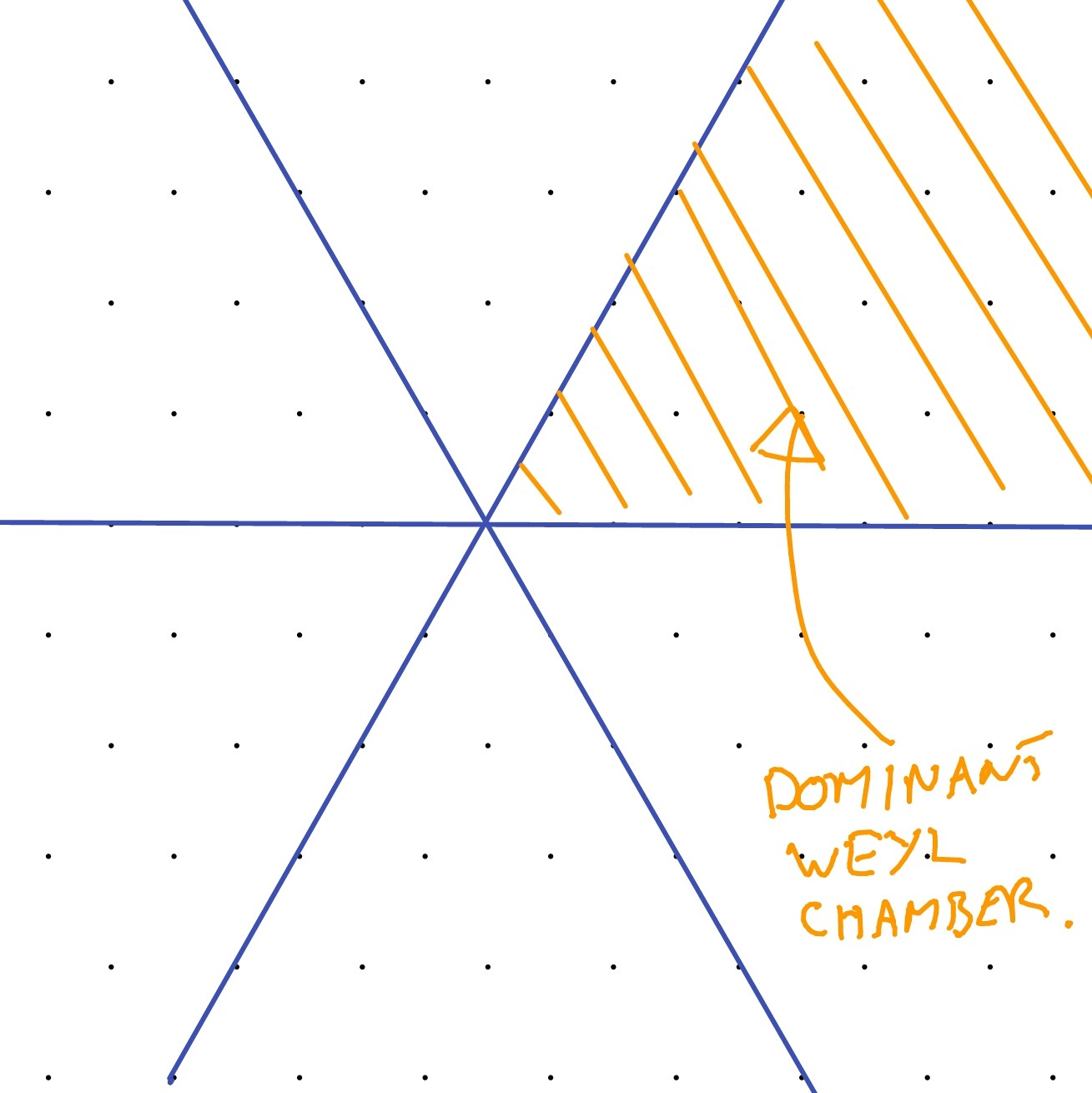
4.7 Dominant weights and Weyl symmetry
Let , , and be, respectively, reflections in the lines through , , and . Then any two of these generate the Weyl group , which is the group of symmetries of the triangle with vertices , so . The dominant Weyl chamber is the region
and weights inside it (including the boundary) are called dominant weights. See Figure 8.
The main result of this section is that every highest weight is dominant.
Proposition 4.25.
Every highest weight of a finite-dimensional representation of is of the form for non-negative integers .
Proof.
Let be a highest weight vector with weight .
Since is killed by , it is a highest weight vector for the restriction of to via . Its -weight is
so by the -theory, is a non-negative integer.
Likewise, since is killed by , the weight is also a non-negative integer.
Since , we can write
which is of the required form with and . ∎
The following result shows that the weight diagram of any finite-dimensional representation has the six-fold symmetry of the Weyl group. Its proof is nonexaminable.
Theorem 4.26 (Weyl symmetry).
Let be a finite-dimensional representation of . Then the weights of are symmetric with respect to the action of the Weyl group.

Proof (nonexaminable).
We will prove they are symmetric with respect to by using the inclusion
that puts a matrix in the top left corner of a matrix. We consider the restriction of to .
The kernel of on is preserved by (check it!) and so has a basis made up of -weight vectors . These are a maximal set of linearly independent highest weight vectors for , so as an -representation,
where is generated by . Fix ; it suffices to show that has a basis of -weight vectors whose weights are preserved by . Let have weight . By Proposition 4.25, , and — recalling — the -theory gives a basis
By the FWC (Lemma 4.18) these are weight vectors with weights
which are symmetrical under (this reflection swaps and ), as required. This argument is illustrated in Figure 10.
Invariance with respect to the other reflections is proved similarly using the other inclusions of in . ∎
Exercise 4.27.
We can give another proof of Weyl symmetry using the Lie group . Let be a representation of . As is simply-connected exponentiates to a representation, , of . Let
Show that, for every weight , is an isomorphism
Give another proof of Theorem 4.26.
4.8 Irreducible representations of sl3,C.
We are now in a position to state the main theorem of -theory.
Theorem 4.28.
For every pair of nonnegative integers, there is a unique (up to isomorphism) irreducible finite-dimensional representation of with a highest weight vector of weight .
Note that the highest weights occurring in the theorem are exactly the dominant elements of the weight lattice.
Since every irreducible finite-dimensional representation does have a highest weight, necessarily dominant, every irreducible representation is isomorphic to for some integers .
Example 4.29.
We have already seen some examples:
-
1.
The standard representation is irreducible with highest weight , therefore
-
2.
The dual to the standard representation is irreducible with highest weight , and so
-
3.
The adjoint representation is irreducible with highest weight , and so
-
4.
The symmetric square has highest weight with highest weight vector .
Exercise 4.30.
(Problem 44.) Use complete reducibility to show that, if is a finite-dimensional representation of with a unique highest weight vector (up to scalar), then is necessarily irreducible.
Deduce that the three representations listed above are indeed irreducible.
For a more general example, we have:
Exercise 4.31.
(Problem 46). Show that the representation has a unique highest weight vector with weight . Deduce that
Convince yourself that the weights in this case are as shown in Figure 11 (which illustrates the case ).
4.9 Proof of theorem 4.28 — nonexaminable
Lemma 4.32.
Let be a finite-dimensional representation of . Let be a highest weight vector of weight , and let
Then
-
1.
is a subrepresentation of
-
2.
i.e. is the unique weight vector in of weight , up to scaling.
-
3.
is irreducible.
Proof.
-
1.
Let
Then
Firstly, it is clear that and take to , and so preserve . Since
we see that also preserves .
Secondly, every is a weight vector (by the fundamental weight calculation) and so an eigenvector for all , . Thus preserves each (and hence also ).
Finally, we show that preserves . A similar proof then applies for , and then preserves by the same argument as for . We prove the statement for by induction on .
For , . Since is a highest weight vector, and so .
Suppose that the claim is true for . Consider with . We must show that . Suppose first that . Then, as , we have
by the induction hypothesis and the fact that is preserved by as required. The proof in the case is similar, using that .
-
2.
Note that if the weight of , with and as in the lemma, then a calculation using the fundamental weight calculation, as in the proof of lemma [[ref:lem-hwv-exists]], shows that
and so if . Since these vectors span , is the unique (up to scalar) weight vector in of weight .
-
3.
Suppose that is reducible. By complete reducibility (Theorem [[ref:thm-complete-reducible-sl]]) we have
for nonzero proper subrepresentations of . We must have for unique . The unicity implies that and are both weight vectors of weight ; by part 2, either or . So without loss of generality . But then all as is a subrepresentation, so contradicting that is a proper subrepresentation.
∎
Remark 4.33.
It follows that as in Lemma 4.32 is actually the subrepresentation generated by , that is, the span of all vectors obtained by applying arbitrary elements of some number of times. The content of the lemma is then that it suffices to apply only and .
We are now ready to prove Theorem 4.28:
Proof.
First we show the existence. Let . Consider
This has a highest weight vector of weight . Let be the representation generated by . Then is irreducible by 4.32 part 3, and has a highest weight vector of weight . Thus we can take .
Next we show the uniqueness. Suppose that are two irreducible representations with highest weight vectors and , respectively, of weight . Let be the representation generated by . Then is irreducible by 4.32 part 3. The projection sending to restricts to a homomorphism which sends to . This is therefore a nonzero homomorphism between irreducible representations, and so must be an isomorphism. Thus . Similarly , and so as required. ∎
In fact, it is possible to give an explicit description of the irreducible representations; see problem 47.
Theorem 4.34.
Let . Let
be the map
Then is a surjective -homomorphism, and its kernel is the irreducible representation with highest weight .