3 SL2
In this section we discuss the finite-dimensional representation theory of the Lie algebra . We then use that to study the representation theory of , , , and , which are all closely related.
3.1 Weights
We fix the following ’standard’ basis of :
| and | ||||
These satisfy the following commutation relations, which are fundamental (check them!):
| and | ||||
Our strategy is to decompose representations of into eigenspaces for the action of . The elements and will then move vectors between these eigenspaces, and this will let us analyze the representation theory of .
Let be a finite-dimensional complex-linear representation of . Since is an endomorphism of a finite-dimensional complex vector space, it has at least one eigenvalue. For , write
for the -eigenspace of .
Definition 3.1.
-
1.
An eigenvalue of is called a weight (more precisely, an -weight) for the representation .
-
2.
Each is called a weight space for .
-
3.
The nonzero vectors in are called weight vectors for .
We will see later (Remark 3.18) that is in fact diagonalizable with integer eigenvalues, so that decomposes as a direct sum of its weight spaces. However, the classification of irreducible representations does not require this.
Example 3.2.
The set of weights of the zero representation is empty, while the trivial representation has a single weight, .
Example 3.3.
Let be the standard representation. Write for the standard basis. Then and . Thus the set of weights of is .
Example 3.4.
We consider the adjoint representation of on itself. By the commutation relations, we see directly that has eigenvalues (), (), and (), so the set of weights is
The non-zero weights and are called the roots of and their weight spaces are the root spaces and . The weight vectors are called root vectors.
Thus we have the root space decomposition
Example 3.5.
We consider where is the standard representation. Then
and similarly
so that the weights are . Note that this is a multiset — a set with repeated elements — and we say that the weight 0 has ‘multiplicity two’ (in general, the multiplicity of a weight is the dimension of the weight space).
Example 3.6.
Take . A set of basis vectors is
We calculate
Thus the weights are (writing ):
We will soon see an explanation for this pattern.
3.1.1 Highest weights
The following is our first version of the fundamental weight calculation.
Lemma 3.7.
Let be a complex-linear representation of . Let be a weight of and let . Then
and
Thus we have three maps:
Proof.
We have, for ,
So as required.
The claim about the action of is proved similarly. ∎
Definition 3.8.
A vector is a highest weight vector if it is a weight vector and if
In this case we call the weight of a highest weight.
Lemma 3.9.
Any nonzero finite-dimensional complex linear representation of has a highest weight vector.
Proof.
Since is finite-dimensional, has at least one eigenvalue. Among all weights of , choose one, , with maximal real part and let be a weight vector of weight . Then has weight by the fundamental weight calculation. Since has strictly greater real part than , it cannot be a weight of , so . ∎
Example 3.10.
Let . Then the highest weight vectors are and .
These are easily checked to be highest weight vectors — the first is killed by since , the second becomes
It is left to you to check that there are no further highest weight vectors.
3.2 Classification of representations of sl2,C.
The key point here is that a highest weight vector must have non-negative integer weight , and it then generates an irreducible representation of dimension whose isomorphism class is determined by and which has a very natural basis of weight vectors.
Let be a complex-linear representation of .
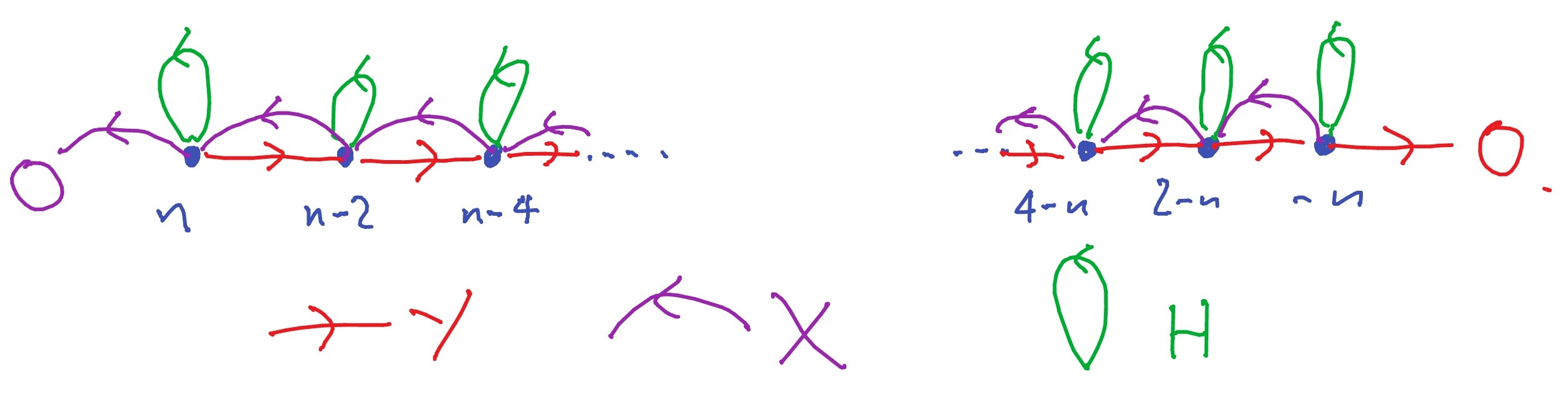
Lemma 3.11.
Suppose that has a highest weight vector of weight . Then the subspace spanned by the vectors
is an -invariant subspace of .
Moreover, , the dimension of is , are a basis for , with .
Proof.
Let be the span of the . Since the are weight vectors, their span is -invariant. It is clearly also -invariant. So we only need to check the invariance under the -action. I claim that for all ,
| (3.1) |
The proof is by induction. The case is:
If the formula holds for , then
| (induction hypothesis) | ||||
as required.
If is not a nonnegative integer, then for all . So
whence for all . As these are weight vectors with distinct weights, they are linearly independent and so span an infinite dimensional subspace.
If for some , then
and so . Repeating gives that , a contradiction.
Now,
and so is either zero or a highest weight vector of weight . We have already seen that the second possibility cannot happen, so .
Thus is spanned by the (nonzero) weight vectors with distinct weights, which are therefore linearly independent and so a basis for . ∎
Remark 3.12.
If we didn’t assume that was finite-dimensional, then the first part of the previous lemma would still be true.
Corollary 3.13.
In the situation of the previous lemma, is irreducible.
Proof.
Suppose that is a nonzero subrepresentation. Then it has a highest weight vector, which must be (proportional to) for some . But then
if and so , meaning that . But then for all , so as required. ∎
The weights of are illustrated in Figure 3.2.
Theorem 3.14.
Suppose is an irreducible finite-dimensional complex-linear representation of . Then:
-
1.
There is a unique (up to scalar) highest weight vector, with highest weight .
-
2.
The weights of are .
-
3.
All weight spaces are one-dimensional (we say that is ‘multiplicity free’).
-
4.
The dimension of is .
For every , there is a unique irreducible complex-linear representation of (up to isomorphism) with highest weight .
Proof.
Let be an irreducible finite-dimensional complex-linear representation of . Let be a highest weight vector. By Lemma 3.11 its weight is a nonnegative integer , and by Corollary 3.13 the vectors span an irreducible subrepresentation of of dimension , which must therefore be the whole of . The claims all follow immediately.
Moreover, the actions of , and on this basis are given by explicit matrices depending only on , so the isomorphism class of is determined by .
It remains only to show that a representation with highest weight exists for all . Consider . The vector is a highest weight vector of weight , so we are done. In fact, in this case is proportional to , so the irreducible representation generated by is in fact the whole of . ∎
In fact, if is the irreducible representation with highest weight , highest weight vector , then the matrices of , , and with respect to the basis
are respectively
| and | ||||
Since is simply connected, we have:
Proposition 3.15.
Every finite-dimensional complex-linear representation of is the derivative of a unique representation of .
Theorem 3.16.
Every finite-dimensional irreducible complex-linear representation of or is isomorphic to , the symmetric power of the standard representation.
Proof.
We already proved this for . By Proposition 3.15, every representation of arises from one of , and since is connected the result follows. ∎
3.3 Decomposing representations
Theorem 3.17.
Every finite-dimensional complex-linear representation of is completely reducible, that is, splits into a direct sum of irreducible representations.
Proof.
This is a special case of Theorem 3.27 below. ∎
Remark 3.18.
Complete reducibility shows that every finite-dimensional representation of is a direct sum of irreducibles. Each irreducible has integer weights and a basis of weight vectors. Thus these properties hold for any finite-dimensional representation: is diagonalizable with integer eigenvalues and we get a weight space decomposition
| (3.2) |
One can also see this more directly: by Proposition 3.15, exponentiates to . The subgroup (embedded via ) acts completely reducibly by Maschke’s theorem (section 2.5), and its irreducible representations are for (Theorem 2.18). Taking the derivative shows that is diagonalizable with eigenvalues in and so is diagonalizable with integer eigenvalues. The integrality of the weights thus reflects the fact that the characters of are indexed by integers.
It is easy to decompose a representation of into irreducibles by looking at the weights. Firstly, look at the maximal weight of . Then there must be a weight vector of weight , which is necessarily a highest weight vector, and so must contain a copy of — namely, the subspace . By complete reducibility we have
The weights of are then obtained by removing the weights of from the weights of , and we repeat the process.
In particular, this shows that a finite-dimensional representation of is determined, up to isomorphism, by its multiset of weights.
Proposition 3.19.
If , are representations of then:
-
•
weights of weights of weights of .
-
•
weights of sums of unordered -tuples of weights of .
-
•
weights of sums of unordered ‘distinct’ -tuples of weights of .
Proof.
If is a basis of weight vectors of with , and is a basis of weight vectors of with , then
is a basis of weight vectors of and
This shows part (1), and the other parts are very similar.
See also section 4.5 below. ∎
Example 3.20.
We should illustrate what is meant by ‘distinct’: it is ‘distinct’ as elements of the multiset. Suppose that the weights of are . Then to obtain the weights of we add together unordered, distinct, pairs of these in every possible way, getting:
Example 3.21.
Let be the standard representation of with weight basis , . Consider .
The weights of are and so the weights of are
This is the same as the set of weights of
and so this is the required decomposition into irreducibles.
We can go further, and decompose into irreducible subrepresentations. This means finding irreducible subrepresentations of such that is their direct sum. To start with we write down the weight vectors:
Let , and be weight vectors in corresponding to the weights , and . Then the weights of are
-
•
, multiplicity one, weight vector: .
-
•
, multiplicity two, weight space: .
-
•
, multiplicity three, weight space: .
-
•
, multiplicity two, weight space: .
-
•
, multiplicity one, weight vector: .
The copy of in has highest weight vector . We can find a basis by repeatedly hitting this with (writing for ‘equal up to a nonzero scalar’):
These vectors are a basis for the copy of in .
Next, we find the copy of in . We start by looking for a highest weight vector of weight 2:
does the trick. Hitting this with gives , and doing so again gives (up to scalar). These vectors are a basis for the copy of in .
Finally, we find the trivial representation in . We need only find a weight vector of weight 0 which is killed by , and
does the job: this vector spans a copy of the trivial representation.
3.4 Real forms and complete reducibility
We use our understanding of the representation theory of to understand the representation theory of and , and prove complete reducibility.
Definition 3.22.
A real form of a complex Lie algebra is a real Lie algebra such that every element of can be written uniquely as for .
For dimension reasons, necessary and sufficient conditions are that and .
Example 3.23.
The Lie algebra is a real form of .
Example 3.24.
The Lie algebra is a real form of . Indeed, and if then
so .
Explicitly, we may write as with
and
in .
Proposition 3.25.
Let be a real form of .
There is a one-to-one correspondence between representations of and complex-linear representations of under which irreducible representations correspond to irreducible representations.
Proof.
Given a -linear representation of , it is a representation of by restriction. Conversely, if is a representation of , then it extends to a unique -linear representation of given by the formula (forced by -linearity)
It is easy to see that this preserves the Lie bracket. The proposition follows (the final statement is left as an exercise). ∎
As a corollary we immediately obtain
Theorem 3.26.
The representation theories of and are ‘the same’ as the complex-linear representation theory of . All finite-dimensional irreducible representations of , , , or are of the form .
Proof.
The claims about Lie algebras follow from the above discussion. Every (finite-dimensional) irreducible representation of is of the form , and these clearly exponentiate to representations of , despite this not being a simply connected group! Similarly for (which is simply connected). Since and are connected, every representation of them is determined by its derivative, so we have a complete list of the irreducible representations. ∎
Theorem 3.27.
Every finite-dimensional complex-linear representation of is completely reducible.
Proof.
Let be a finite-dimensional complex-linear representation of and let be a subrepresentation. Then is an -subrepresentation. As is simply-connected, and exponentiate to representations of . Since is compact, by Maschke’s theorem there is a complementary -subrepresentation with
Then is a -subrepresentation, and so (since is a real form of ) a -linear -subrepresentation. Complete reducibility follows. ∎
The argument in this proof is called Weyl’s unitary trick.
3.5 SO(3)
3.5.1 Classification of irreducible representations
We have already (see the first problem set this term) seen that and are isomorphic. We therefore have:
Theorem 3.28.
There is an irreducible two-dimensional representation of (coming from ) such that the irreducible complex representations of are exactly
for .
We want to know which of these representations exponentiate to an irreducible representation of . For this, we revisit the connection with from section 2.4.
There is a surjective homomorphism , given by the adjoint action of on its Lie algebra endowed with a certain symmetric positive definite bilinear form. The kernel of is .
Theorem 3.29.
For each , there is a unique irreducible representation of of dimension .
The derivative of this representation is isomorphic to the representation of .
This gives the complete list of irreducible representations of up to isomorphism.
Proof.
We simply have to work out which representations of exponentiate to a representation of . Since we have
and each exponentiates to a unique representation of — which we also call — this is equivalent to asking for which the centre of acts trivially on . But we see that acts as , so the answer is: for even only.
Thus exponentiates to a representation of if, and only if, is even, and we obtain the result. ∎
There is an orthonormal basis of given by
respectively. We have computed in 2.4 that, under the (adjoint) map , with respect to this basis,
It will be useful to know where this isomorphism takes the elements of . For example, as , we see that it goes to . Or, for the lowering operator , we have
and similarly .
With this calculation in hand, we can consider the weights of the representations in 3.29. Under the isomorphism
the element maps to . Since the -weights of are , we must divide these by to find the weights of acting on :
Example 3.30.
Consider the standard three-dimensional representation of on . The weights of are simply its eigenvalues as a matrix, which are . We see that this representation is isomorphic to .
3.5.2 Harmonic functions
Remark 3.31.
We went through this very quickly in the lecture; I have marked as nonexaminable the proofs that we skipped.
We can use our understanding of the representation theory of to shed light on the classical theory of spherical harmonics.
We let be the subspace of consisting of homogeneous polynomials of degree . This has an action of given by
where is a vector in . We therefore get a representation of and hence also of .
Lemma 3.32.
The elements , and of act on according to the following formulae:
Proof.
(nonexaminable) Exercise. In fact, prove that the action of is given by
by considering
at (where we rewrite as ). ∎
The representation is not irreducible. Let be the polynomial
Note that is clearly invariant under the action of .
Lemma 3.33.
The map defined by
is an injective homomorphism of -representations.
Proof.
We have, for ,
as required. ∎
Next, we consider the Laplace operator:
This is map from .
Lemma 3.34.
The map is a map of representations.
Proof.
(Nonexaminable.) We must show that, for ,
We have
and so
We sum over , for fixed and :
since is orthogonal. We therefore obtain
and therefore
∎
An element is harmonic if . Since , nonzero harmonic polynomials must exist for all . We write for the space of harmonic polynomials.
Lemma 3.35.
On , we have
Proof.
Left as a nonexaminable exercise. You may find the following useful:
Lemma 3.36.
(Euler’s formula) If , then
∎
It follows that preserves every subrepresentation of (since do). Furthermore, by Schur’s lemma it must act on each irreducible subrepresentation as a scalar. We determine that scalar.
Lemma 3.37.
nonexaminable Suppose that is an irreducible subrepresentation with highest weight . Then
Proof.
Since is a -homomorphism and is irreducible, by Schur’s lemma it acts as a scalar on . It therefore suffices to compute the action on a highest weight vector . So
It follows that and, as
we have .
Applying the previous lemma gives the result. ∎
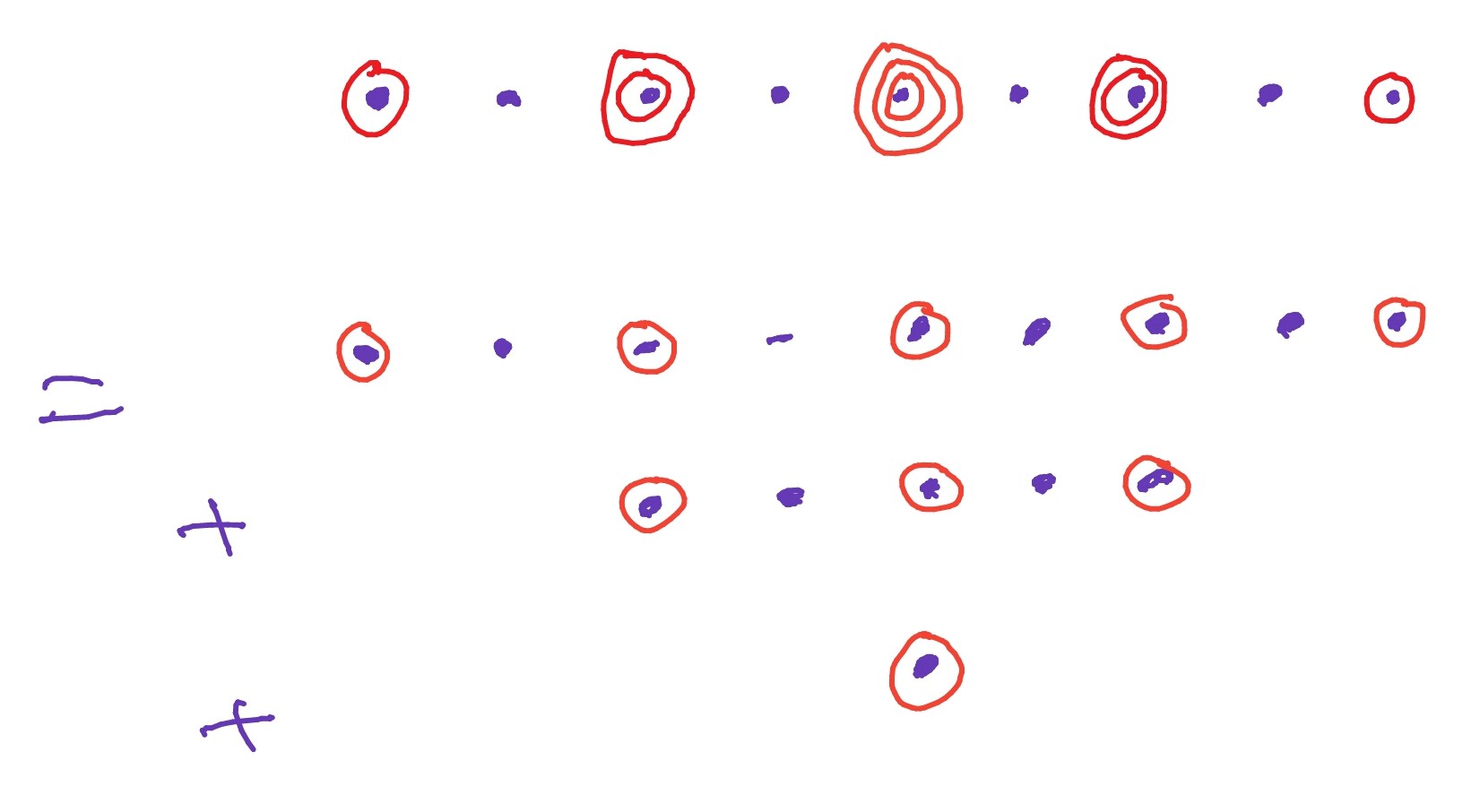
Theorem 3.38.
For every ,
The space is the irreducible highest weight representation of of dimension , and the space has the following decomposition into irreducible subrepresentations:
Proof.
(Nonexaminable.) We use induction on . The case is clear (we just have the trivial representation). Suppose true for with .
By the previous lemma, the space is the sum of all the copies inside of the irreducible representation with highest weight . Since does not contain this irreducible representation, by the inductive hypothesis, we have
Since as already discussed, its dimension is a positive multiple of . However, its dimension is at most
It follows that is irreducible, and that we have
The statement about the decomposition into irreducibles follows. ∎
Thus every homogeneous polynomial has a unique decomposition as a sum of harmonic polynomials multiplied by powers of .
We can go further and give nice bases for the by taking weight vectors for . First, we have
Lemma 3.39.
The function is a highest weight vector of weight .
Proof.
Exercise! ∎
We then obtain a weight basis by repeatedly applying the lowering operator
The functions thus obtained are known as ’spherical harmonics’ (at least, up to normalization), and give a particularly nice basis for the space of functions on the sphere . The decomposition of a function into spherical harmonics is analogous to the Fourier decomposition of a function on the unit circle.
Example 3.40.
If , then , and the weight vectors are
If , a basis of made up of weight vectors is