6 Solutions
Solution to (1).
Solution to (2).
Solution to (3).
2. Since each , and , we have
as is a closed subset of (alternatively, note that by part (1) the sum is actually a finite sum).
3. The sum is finite since, for , and so for all .
4. We have, as power series in , since this holds for all sufficiently small. Similarly, as power series in . Since all powers of commute with each other and there are no convergence issues (by the previous part and the fact that converges absolutely everywhere) we may substitute in .
In fact, this shows that and define diffeomorphisms between a neighbourhood of zero in and a neighbourhood of the identity in .
Solution to (4).
2. I claim that is not in the image of the exponential map from . Indeed, suppose it were of the form where . Then the eigenvalues of must add to zero; since they are nonzero (as they exponentiate to ), they must be distinct. But then for some diagonal and some since every matrix with distinct eigenvalues is diagonalizable. Then would be diagonalizable, which it is not.
For the second part, we take the same and suppose it is of the form for . Then the eigenvalues of are imaginary, since they exponentiate to , and since is real they must be a complex conjugate pair. But then we get a contradiction in the same way: is diagonalisable but is not.
Solution to (5).
The function is clearly continuous, and it is a one-parameter subgroup as is rotation by about , which is the same as rotation by followed by :
We compute . If is parallel to , this is zero.
If is the projection of on , and , then rotation about initially moves in the direction perpendicular to and (note that we consider rotations as being anticlockwise when looking from the ‘nose’ of towards the origin).
We have
Thus
since where is the angle between and . This formula also holds in the parallel case.
Thus the infinitesimal generator is
where .
Solution to (6).
Conversely, if for all , we have
for all . Taking the derivative at gives
Thus the Lie algebra of is
We have that if and only if is imaginary for all and
for all . Thus is determined by its imaginary diagonal entries and its complex entries above the diagonal. Its real dimension is thus
If is nonzero, then
so . Thus is not a complex subspace of .
For a challenge, try to show that there is no complex structure on : there is no linear map
such that
for all and
for all (for odd this is easy, but it is trickier for even).
Solution to (7).
whence . Conversely, if for all then
for all . Differentiating with respect to at gives
as required.
For the last part, we need only show that implies . But if then
so as required.
Solution to (8).
1. Problem 55 suggests that we consider the following basis of infinitesimal rotations around the axes:
In fact, these are the images of under an isomorphism . By calculation we have
These may remind you of the quaternion group, whose irreducible two-dimensional representation leads us to consider the following basis for :
We have
— we need the factors of for this, otherwise the right hand sides would be doubled.
It follows that the linear map taking to , to and to is an isomorphism of Lie algebras.
2. By the problems class (or problem 7), we know that has a basis with
We calculate that , and . It follows that satisfy the same commutation relations as
so that there is a Lie algebra isomorphism sending , , .
How might you think of this? Well, the eigenvalues of the linear map are , with and the eigenvectors. So you might look for an element of such that the eigenvalues of are , and above works; and are then the eigenvectors!
For a more conceptual approach, let , a bilinear form on . For each , is a linear map preserving this bilinear form. But it is possible to write down a basis of such that
With respect to this basis, is the bilinear form determined by and so for all . The derived map on Lie algebras is the desired isomorphism.
3. Here is a possible approach. Show that acts on the four-dimensional real vector space of Hermitian matrices by for and a Hermitian matrix. The quadratic form on is preserved by this action. It has signature ; indeed, it is positive definite on the space of matrices
and negative definite on the subspace of matrices
We obtain a map ; its derivative is the required isomorphism.
Solution to (9).
We prove the first part. Let be the matrix defining the standard symplectic form, so that
If , then , and hence
Taking traces and using that trace is invariant under conjugation gives
Therefore .
For the second part, try induction.
Solution to (10).
Suppose that and . We must show . By assumption, there is a path with , . Then is a path from to so as required.
Alternatively, we have that, for any , is open and closed in and contains the identity. It therefore contains . But by the same argument contains . So .
Solution to (11).
1. Let be rotation by about , for — every element of has this form. Then, for any and , the path
is a continuous path in from the identity to , showing that this group is connected.
2. Induction on . Base case: , clear from the explicit description of .
Suppose true for . Let be a unit vector and let . Let , and let be a plane containing . Then there is some rotation such that . Extend to an element of by letting it act as the identity on : explicitly, for . Since is connected, there is a path from to . Then is a path from to , and it suffices to show that is connected to the identity. Note that fixes and so is determined by its action on . By the induction hypothesis applied to , we can connect to an element that fixes and , and therefore fixes . In other words, is connected to the identity.
Solution to (12).
We deduce that the map is a diffeomorphism (it and its inverse are clearly smooth). Moreover, writing , , the latter space is
which is the three-sphere.
Solution to (14).
Firstly we will show that the Lie algebra of is contained in . Indeed, suppose that with
for all . Then for all ,
for all . Taking the derivative at gives
for all and taking the derivative of this at gives for all , whence .
Conversely, if is connected and , then I claim that for all . Indeed, for ,
as . So commutes with all elements of of the form . Since these generate by the connectedness assumption, we see .
Solution to (16).
1. I claim that for , is a -homomorphism. Indeed, if then
By Schur’s lemma, as is irreducible, there is such that for all . As is linear, so is .
2. If , then it commutes with every matrix. Let be the diagonal matrix with ‘1’ in position and ‘0’ elsewhere. Then implies that for . Hence is diagonal, with entries . But then commutes with the elementary matrix , with ‘1’ in row and column and ‘0’ elsewhere, if and only if . So all the are equal, so is scalar. Conversely, all scalar matrices are in . So
If , then for all ,
so is the linear map
Solution to (17).
We use induction on . The case is clear — in that case, we just get
Suppose the result is true for . Then
as required.
For the second part, for all and in we have
as required.
Solution to (18).
2. Fix . Then the -invariance is simply the previous part applied to the function
It is clear that the form is sesquilinear as is. Finally, it is positive definite: if then
since the integrand is positive for all .
3. This is the proof of Maschke’s theorem. Suppose is a finite dimensional representation and is a subrepresentation. By part (2), there is a -invariant Hermitian inner product on , and then . By the -invariance, is also a subrepresentation. This implies that is completely reducible.
Solution to (19).
1. Every orthogonal matrix has determinant (which follows from taking of ). So is a surjective homomorphism — it is surjective because — and its kernel is . This implies that has index 2 in , by the first isomorphism theorem. As is an element in the non-identity coset, we have ; as every element of has the form , we get the second claim.
Finally,
as required. Geometrically, is reflection about a line through the origin making an angle of with the -axis (it is the reflection that maps to ).
2. Suppose that is an irreducible finite-dimensional representation of . As a representation of it is completely reducible; every irrep of is one-dimensional of the form for some integer . So there is an integer and nonzero such that
for all . I claim that span a subrepresentation; clearly their span is preserved by , and
so it is preserved by for all as well. As is irreducible, we have
Now, if then, since has different eigenvalues on and (for general ), they are linearly independent and . If then we switch and , and now . Now is determined up to isomorphism by , as in the basis we have
and
Different give different eigenvalues for and hence non-isomorphic two-dimensional representations.
If then , are fixed by . In this case, either or is nonzero and spans a one-dimensional subrepresentation which must then be all of . Thus is one-dimensional, and either isomorphic to the trivial representation or the determinant representation (according as or ).
Solution to (20).
For typesetting reasons I’ll write for the column vector .
Starting with :
by the multivariable chain rule. Thus acts as and a very similar calculation shows that acts as .
Finally,
so that acts as .
An alternative solution would be to compute
using the multivariate chain rule. The derivative of at -s and the derivative of is so we get that the required derivative is
which one can check agrees with the answers from before.
Remark. Another possible convention is to use rather than , which leads to slightly different formulas. This second convention is the same as if we considered elements of as row vectors, with matrices acting on the right, and defined instead
Solution to (21).
1. Let be the standard basis vector for . Then
Multiplying out, and noting that while , we get that
which is what we want (since ).
2. This is similar. We get, with ,
This simplifies to
as required.
3. Compute the action of on the basis vectors . Skipping the working, the result is
Solution to (22).
We have
as required. If are highest weight vectors then
so is a highest weight vector.
Solution to (23).
-
1.
If is a basis of weight vectors of with weights , then the dual basis is a basis of weight vectors of with weights . Proof: we have
so that
as required.
-
2.
Since the weights of every irreducible representation of are symmetrical about the origin, and every representation is a direct sum of irreducible representations, the weights of are symmetrical about the origin. Thus the weights of are the same as the weights of . Since the weights determine the representation up to isomorphism, we have .
Solution to (24).
-
1.
We will show that commutes with each of , and . Note that, since is a Lie algebra representation, we have
For instance, the first equation follows from . So we get
and therefore
Similarly, commutes with . Finally,
If is irreducible, then since commutes with all elements of it is a homomorphism and so is scalar by Schur’s lemma.
-
2.
The representation is irreducible, and so is a scalar. To find the scalar, we just need to evaluate on a single element of ; I will use the highest weight vector . We have
so acts as the scalar on . Here we see why we might want to use instead: then it acts as .
-
3.
Recall that acts as , acts as , acts as . We see that
If we apply this to a monomial of degree , we find that
We can explain this as follows: the space of homogeneous polynomial functions of degree is isomorphic to and so the calculation from the previous part applies!
Solution to (25).
The idea is to use the formulae we found for the actions of and on a weight basis for a representation of in the course of proving their classification to just define a representation with highest weight .
Let be an infinite-dimensional vector space with basis . Define a representation of on by
for all (so ). To check that this does define a representation, we must check that for all (it suffices to consider each pair of distinct elements in one particular order). And indeed we have:
as required.
Finally, is killed by and is a weight vector of weight , so has highest weight .
Advanced remark: will be irreducible unless is a nonnegative integer, in which case the vector generates a subrepresentation isomorphic to and the quotient representation is exactly the finite-dimensional irreducible representation with highest weight .
Solution to (26).
We use the notation for the usual weight basis of , so has weight , for . We have the formulas and . We also abbreviate .
-
1.
The weights of are . To obtain the weights of we add together all possible (unordered, possibly equal) pairs of these and get:
Thus
A highest weight vector of weight 4 is (clear as it is a symmetric product of highest weight vectors). To get a highest weight vector of weight 2 we must take a linear combination of and which is killed by . Since and we see that
is a weight vector of weight 0 killed by , so a highest weight vector of weight 0.
-
2.
This time we must take all sums of unordered pairs of /distinct/ elements of . This gives
so that . A highest weight vector of weight is .
-
3.
We have to add together all pairs of weights from and , giving
as the weights of . Thus the decomposition is
A highest weight vector of weight 5 is . We can now apply repeatedly (and divide out by constant factors where possible to keep the numbers small) to obtain a weight basis of the copy of in the representation, as shown in the table.
We have and so that
is a highest weight vector of weight 3. We apply repeatedly (and divide out scalars where possible) to obtain a weight basis of the copy of in the representation:
Notice that we can ‘cheat’ and obtain just the weight vectors with nonpositive weight, and then apply the symmetry sending to to obtain those of nonnegative weight.
Finally, we have , , and so that
is a highest weight vector of weight 1. Applying (or the symmetry discussed above) we see that this vector together with
is a weight basis for the copy of .
-
4.
We must add together all unordered triples of (not necessarily distinct) elements of . We get that the weights of are:
so that
A highest weight vector of weight is . We have and so that
is a highest weight vector of weight 2.
Solution to (27).
-
1.
The weights of are and the weights of are . Without loss of generality, . Adding these lists together, remembering multiplicity, we see that in the tensor product:
-
•
For weights , each occurs times as
; the same holds for their negatives.
-
•
Each weight occurs times; specifically, occurs as
This agrees with the weights of
and so this is the decomposition of into irreducibles.
-
•
-
2.
Omitted (for now).
Solution to (28).
Let , , be a basis for , so that etc. Let be a general element of . Then we compute that the matrix for the adjoint action of with respect to the basis is:
This has characteristic polynomial which has distinct roots (unless in which case ) so the adjoint action of is diagonalizable. So, for every , the map is diagonalizable. This is not true for , since the action of is, wrt the standard basis ,
which is not diagonalizable.
Here is another, related solution. For every finite-dimensional (nonzero) representation of , is not diagonalizable. But in the standard representation of , every element is diagonalizable. Indeed, if then is Hermitian, and hence diagonalizable, so is diagonalizable. So cannot be isomorphic to .
Solution to (29).
The eigenvalues of on the weight basis for are for . The trace is then (using the formula for the sum of a GP)
Solution to (30).
-
1.
This follows from Schur’s lemma, since is in the centre of .
-
2.
Suppose otherwise. Then there is a proper, nonzero subspace preserved by for all . But is also preserved by as is scalar. So is preserved by
so it is a -subrepresentation, contradicting that is irreducible.
-
3.
Let be the irreducible representation of of dimension . To extend the action of to an action of we have to send to a map commuting with the action of . Since is irreducible, we must send to a scalar map, and any scalar is possible.
-
4.
If the representation from the third part exponentiates to a representation of , then we must have that
This implies that is an integer of the same parity as . Moreover, if is such an integer then we get a representation of with the required derivative by taking
where is the standard representation of and is the one dimensional representation on which acts as .
Thus the irreducible finite-dimensional representations of are parametrised by pairs where is an integer and is an integer of the same parity as .
Solution to (31).
-
1.
We have and so
Summing over , and we see that
Note that
since
Thus
On , acts as multiplication by (Euler’s identity), and so
as required.
-
2.
The isomorphism sends
The Casimir for is
(where this multiplication is not as matrices but as operators on a fixed representation!), and under the isomorphism above this goes to
which multiplies out to
Thus, as operators on ,
Solution to (32).
-
1.
We first check that is a weight vector for :
so that it is a weight vector of weight .
Recall that the raising operator is
Thus
so that is a highest weight vector as required.
-
2.
The lowering operator is (up to sign)
Applying this once to we find that
is a weight vector for of weight ; we may throw away the constants to get just
(for ; for we just get !). Applying the lowering operator to this, we get
which simplifies to
a weight vector of weight (for ; for we just get here, while for we get ).
-
3.
When we apply the procedure from the previous part to get a weight basis
When the procedure from the previous part gives weight vectors
We can now either continue applying the lowering operator, or observe that the substitution preserves harmonic polynomials and sends weight vectors for of weight to weight vectors for of weight so that we get a weight basis
(Proof: let be a harmonic polynomial and weight vector for , and let . Then , so is harmonic, while
and so is a weight vector with weight minus that of .)
Solution to (33).
-
1.
Note that
and so
Summing over and using Euler’s identity
for gives
on , as required.
-
2.
Notice that, if , then and so
Iterating, we see that
-
3.
Suppose is nonzero. Then we may write where and is not divisible by . Then
by the previous part and the fact that is harmonic. Since , we see that
and so for some constant . But this contradicts our assumption that is not divisible by !
Solution to (34).
-
1.
For the first part, we first find a basis of weight vectors for (with respect to ). This amounts to finding the eigenvectors for ; we see that is an eigenvector (weight vector) of eigenvalue (weight) 0 and that are eigenvectors of eigenvalue (note the signs!!).
It follows that a weight basis of is given by taking the product of any two of with the weights being the corresponding sums of two of . We find that the weights are
A weight vector of weight is given by . A weight vector of weight is given by . Finally, a basis of weight vectors of weight 0 is given by and .
Since the weights of agree with the weights of — notation as in Theorem 3.29 — this is the decomposition into irreducible representations. We now have to find and as subrepresentations of .
To find the copy of , we need to look for a weight vector of weight 0 preserved by , and . Note that
and . Similar calculations show and . It follows that is killed by each of , and and therefore spans a copy of the trivial representation.
The copy of inside is spanned by the weight vectors of nonzero weights together with a weight vector of weight 0 which may be obtained by applying the lowering operator to the weight vector of weight . This gives
simplifying to . Thus a basis of weight vectors for the copy of in is
An alternative approach is to notice that if we write , and , then is simply isomorphic to the representation of on homogeneous linear polynomials. Then the symmetric square of is exactly the space of homogeneous quadratic polynomials, which we know decomposes
The basis for we wrote down above then corresponds exactly to that in example 3.40, while the copy of the trivial representation is spanned by
-
2.
The weights of are . Thus the weights of are obtained by adding all possible ordered pairs of these, giving
This agrees with the multiset of weights of
so that this is the required decomposition (because representations of are determined by their weights). Note that, thankfully, we aren’t asked to find these as subrepresentations!
Solution to (36).
For we have and a weight, a linear map , is uniquely determined by . Thus we identify weights with complex numbers (actually integers, for finite-dimensional representations).
With this identification, the roots are and the root spaces are and .
Solution to (37).
Let be the dual representation. If , then the matrix of with respect to the dual basis is . From this, we see that if , while and .
Moreover, if is diagonal with entries , then . Thus is a weight vector with weight . Since is killed by and , it is a highest weight vector.
It is worth thinking about how you derive the formula for the matrix of with respect to the dual basis. It is defined so that, for and , and ,
We apply this with , recalling that . Then
This implies that
which exactly says that the matrix of with respect to the dual basis is minus the transpose of the matrix of with respect to the original basis.
Solution to (38).
By definition consists of elements of that may be written as an integer linear combination of the . Any such linear combination clearly satisfies the given condition. Conversely, if satisfies and , then
since .
The need not be integers; indeed, for any .
Solution to (39).
-
1.
See Figure 12.
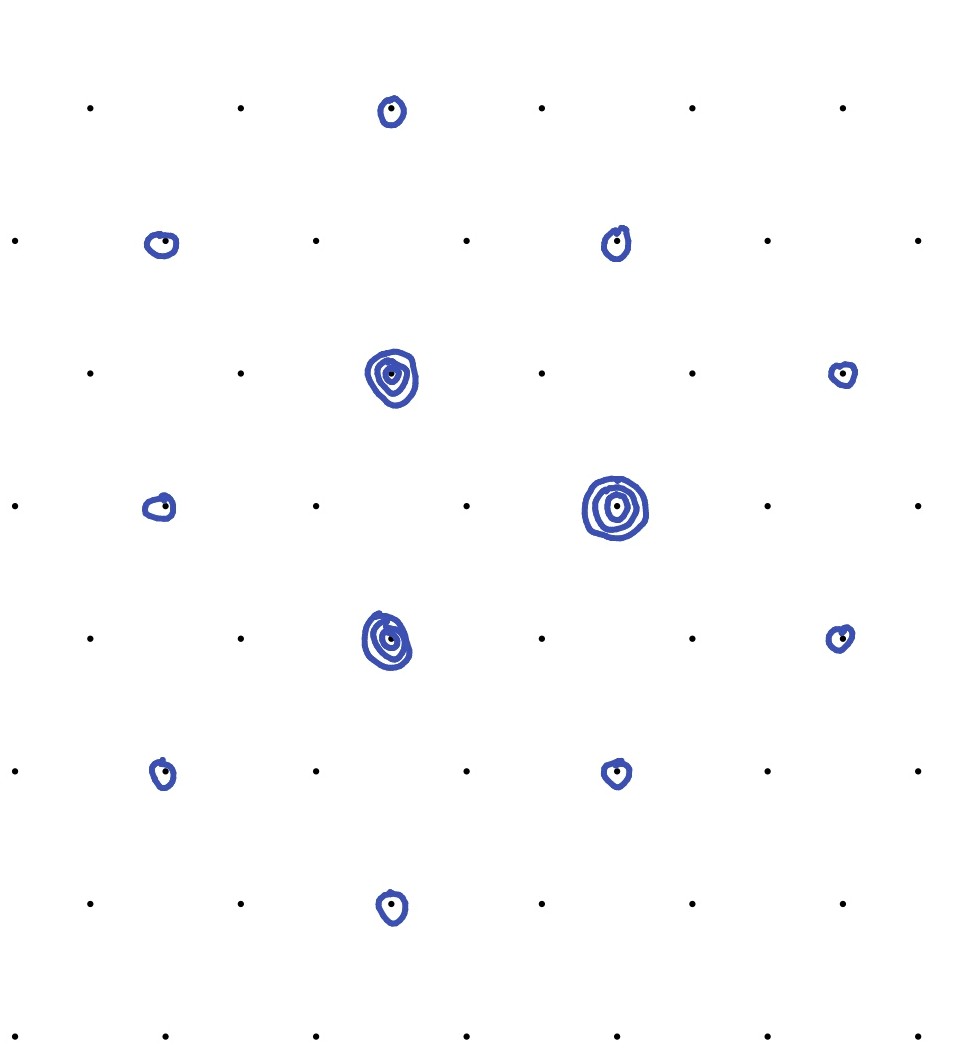
Figure 12: Root lattice (blue) inside weight lattice (black). -
2.
A complete set of coset representatives for is , , (please check this!), so the index is three.
Alternatively, there is a homomorphism sending to , and one can show that the kernel of this homomorphism is .
-
3.
Here . We have an isomorphism taking to . The weight lattice is then . The root lattice is since the eigenvalues of on the adjoint representation are . The index is therefore two.
-
4.
If is a weight vector of weight then the subrepresentation generated by must be all of . Thus is spanned by
and we see from the fundamental weight calculation that is spanned by weight vectors all of whose weights differ from by an integer linear combination of roots, as required.
Solution to (40).
The weights of are with non-negative integers summing to 3. By Weyl symmetry it is enough to find the dominant weights. Since
these are those with . The only possibilities for are then and corresponding to
Applying Weyl symmetry we see that the weights are
It is left to you to draw these; for a similar picture of see 11.
Solution to (41).
The representation has a highest weight vector of weight . It therefore contains a subrepresentation isomorphic to (which will be the subrepresentation generated by ).
The weights of are (as we can write in three ways). Therefore, looking at weights, we have
where is a one-dimensional representation with a single weight, 0. Therefore is trivial and
To find the trivial representation inside , we look for a HWV of weight 0. The following works:
For a conceptual proof, if and are any representations of a Lie algebra then we can define a representation on by
for . Then we have a map
sending
where is defined by
One can check that this is a -isomorphism (if and are finite-dimensional). In the case at hand we get
where the right hand side is a representation of by the same formula defining the adjoint representation. Then
as representations of , with corresponding to the subspace of scalar matrices and in the obvious way.
An intuitive way to see the isomorphism is that is ‘row vectors of length ’, is ‘column vectors of length ’, and is ’ matrices’, and the isomorphism takes a column vector tensored with a row vector to the matrix .
Solution to (42).
First I claim that if is a representation of a Lie group on with derivative , then
Indeed, we may assume that when this just becomes . Alternatively, the left hand side is the derivative at of
which gives the result.
Let . By the above, we have that, for ,
If and is diagonal with entries , then . Since is diagonal with entries ,
where .
This shows that maps to ; since the inverse provides a map in the other direction, this is an isomorphism.
This shows that the weights of a representation, with their multiplicities, are preserved under swapping and . Similarly for any transposition, and hence for any permutation of the .
Solution to (43).
It is easy to see that its weight is . Moreover, as and are highest weight vectors, so are and , and so is their tensor product.
(General lemmas: if is a highest weight vector, then for each positive root vector , so is a highest weight vector in (you should also check it is a weight vector!). If are highest weight vectors, then
for each positive root vector so is a highest weight vector (you should also check it is a weight vector!).)
Solution to (44).
Suppose that is reducible, so that there is a nonzero proper subrepresentation . Then by complete reducibility, there is another subrepresentation with . Then and both have nonzero highest weight vectors, which must be linearly independent from each other, contradicting the assumption on .
For the standard representation, the weight spaces are spanned by , , and respectively and only (or a scalar multiple of it) is a highest weight vector. So it is irreducible. Similarly for the dual representation.
For the adjoint representation, out of the nonzero weights only is a highest weight, with unique highest weight vector. We have to check there are no highest weight vectors of weight zero. Such a vector would be a nonzero element such that for all . This would imply that is scalar, but since has trace zero this is impossible.
Remark: this is not the simplest way to see that the standard representation is irreducible; indeed, the action of on is transitive, which implies irreducibility. Similarly for the dual. Can you prove that the adjoint representation is irreducible without using weights?
Solution to (45).
-
1.
The weights of are while the weights of are , , . Adding everything from the first list to everything from the second, we see that has weights
The weight diagram is shown in figure 13.
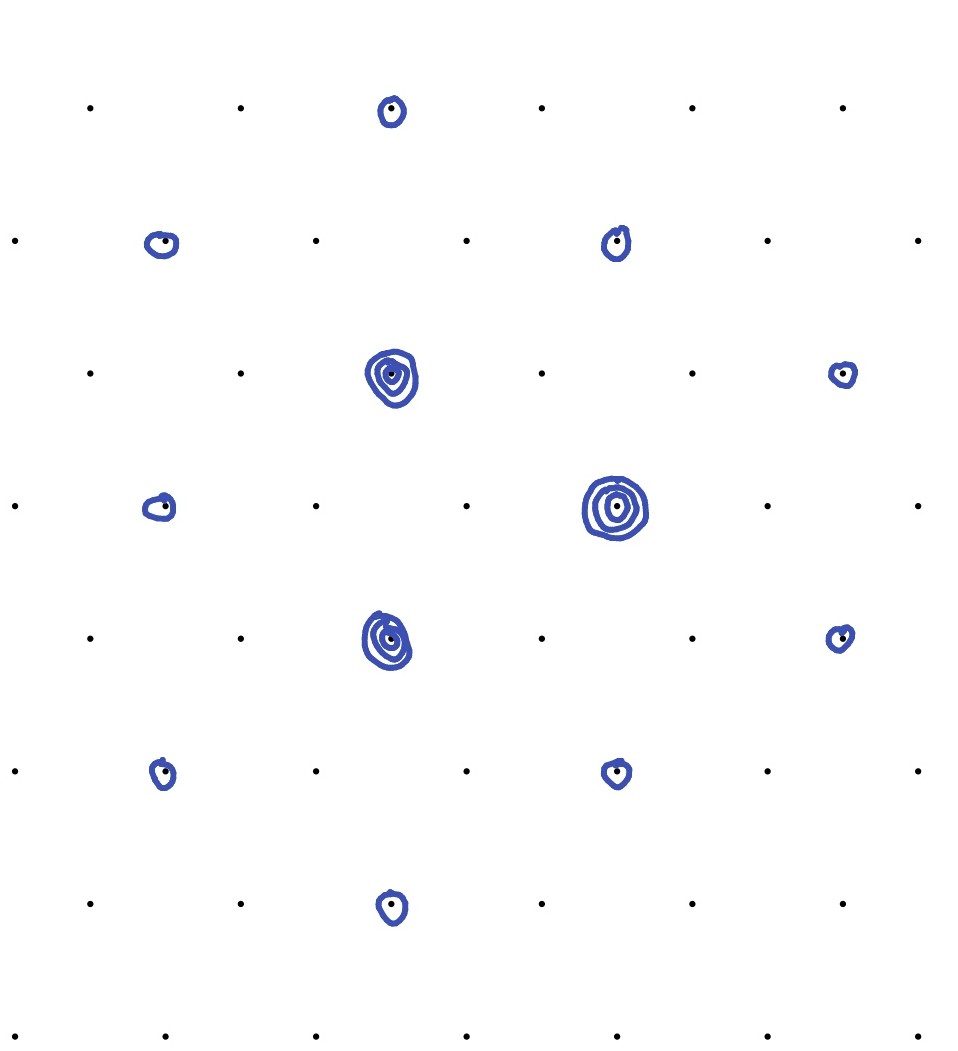
Figure 13: Weights for . -
2.
Since is a weight vector of weight and is a weight vector of weight , their tensor product is a weight vector of weight . Similarly, the other terms are also weight vectors of weight . Therefore their sum is also a weight vector of weight .
We can hit it with and , using :
and
so it is a highest weight vector.
-
3.
We find whence
while so
These are linearly independent, as only appears in the second while only appears in the first.
-
4.
Let . Note that is completely reducible, and the possible irreducible constituents are , , and , since these are the only weights of that are dominant. Since has a highest weight vector of weight , and this is not a weight of or , must have a subrepresentation . As is the unique highest weight vector of weight , it must occur in . Similarly, since (by part 2) has a highest weight vector of weight , must have a subrepresentation . In fact, one can check that has basis
together with the two similar vectors obtained by permuting the roles of .
So we have and we want to show equality. Note that is a highest weight vector in of weight , and is a nonzero weight vector in of weight . Moreover, part (3) implies that occurs with multiplicity at least two in . We also have that occurs in with multiplicity one. All the dominant weights of are now accounted for by with the correct multiplicities. Thus, by Weyl symmetry, the weights of agree with the weights of and we have equality. We see that the multiplicities of , , are exactly two in and all other weights in occur with multiplicity one, and we have
The weight diagram of is obtained from that of (see part (1)) by removing one circle around each of , , and .
Solution to (46).
-
1.
We have that
So is a weight vector, and we know that these are a basis for .
To see that they are distinct, suppose that and for nonnegative integers , etc., and that
Then
which implies that . But as , this common difference must be zero, so , and as required.
-
2.
Suppose that is a highest weight vector. Since all the weights from the first part are distinct, the weight spaces are one-dimensional, so (after scaling) for some . We have
as is a highest weight vector, so . Similarly, . Thus (up to scalar) is the unique highest weight vector.
-
3.
By part 2 and the previous question, has a unique highest weight vector (up to scalar), and so is irreducible. Its highest weight is the weight of , which is .